Proiecta
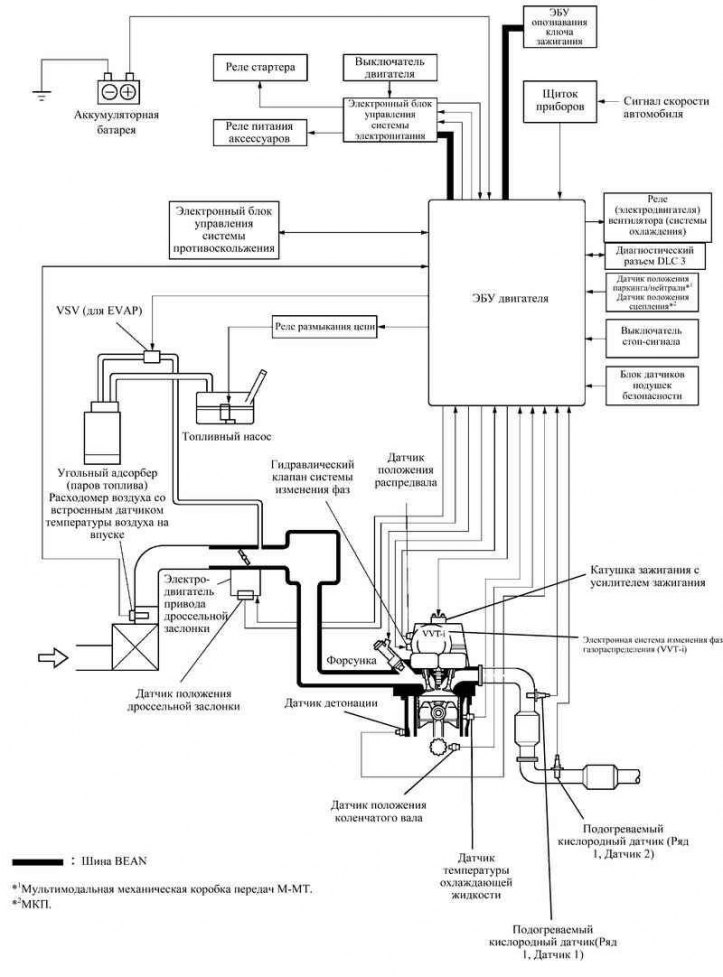
Orez. 2.30. Schema structurală a sistemului de management al motorului
Figura 2.30 prezintă configurația sistemului electronic de management al motorului.
Componentele principale ale sistemului de management al motorului
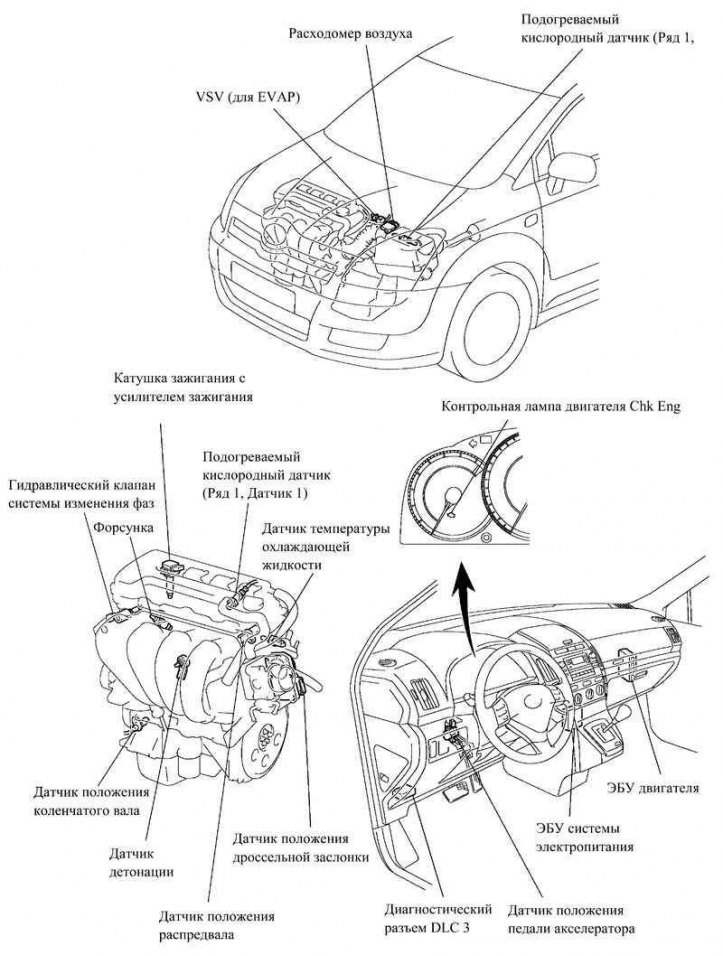
Orez. 2.31. Amplasarea principalelor componente ale sistemului de control al motorului 1ZZ-FE ȘI 3ZZ-FE
Sistemele de control al motorului 1ZZ-FE și 3ZZ-FE includ unități enumerate în tabelul 2.6.
Tabelul 2.6. Componentele principale ale sistemului de management al motorului
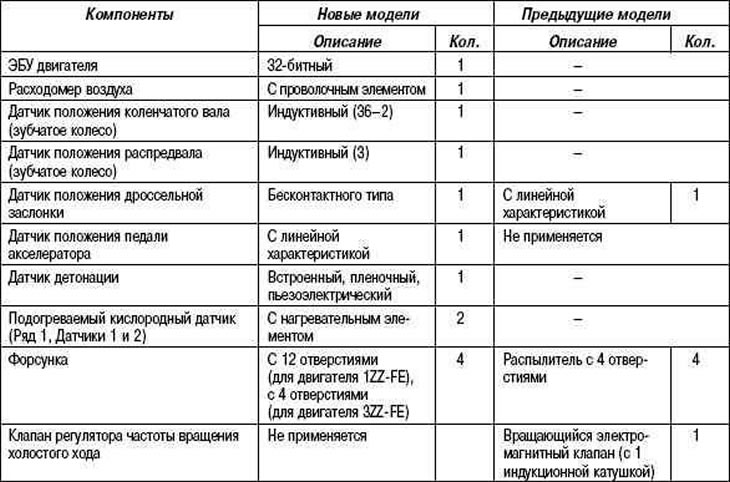
ECU motor
ECU-ul motorului se bazează pe un procesor pe 32 de biți.
Senzor de oxigen și senzor de raport aer combustibil
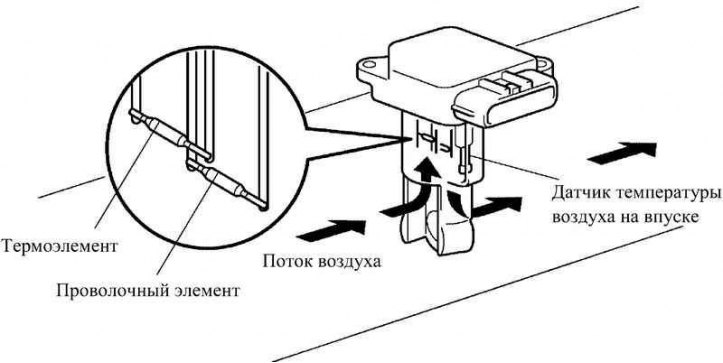
Orez. 2.32. Senzor de oxigen și senzor de raport aer combustibil
În galeria de admisie sunt instalate un senzor de oxigen de dimensiuni mici și un senzor de raport aer-combustibil cu masă redusă. O parte din aerul care intră în motor trece prin zona de măsurare a senzorului (orez. 2.32). Datorită faptului că masa și debitul aerului care intră în motor sunt măsurate direct, precizia măsurării este crescută și rezistența pe care o creează senzorul în galeria de admisie este redusă.
Senzorul are încorporat un senzor de temperatură a aerului.
Senzor de poziție a arborelui cotit
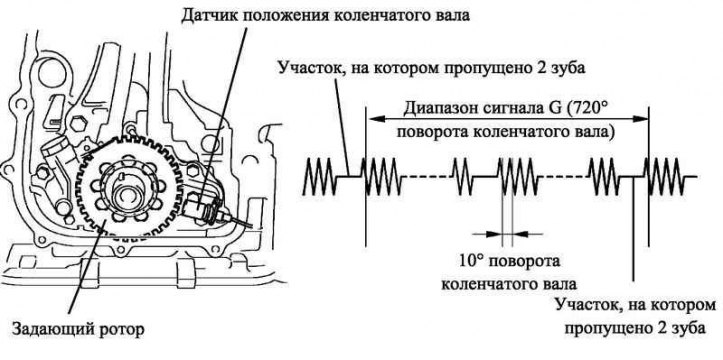
Orez. 2.33. senzor de poziție a arborelui cotit
Rotorul de antrenare a arborelui cotit are 34 de dinți și o secțiune în care lipsesc 2 dinți. Senzorul de poziție a arborelui cotit trimite un semnal la fiecare 10°, iar punctul mort superior este determinat de zona cu dinții lipsă (orez. 2.33).
Senzor de poziție a arborelui cu came
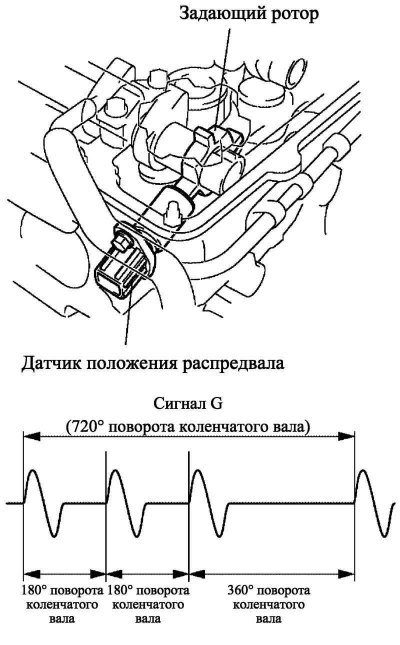
Orez. 2.34. Senzor de poziție a arborelui cu came
Pentru a determina poziția pe arborele cu came de admisie, este instalat un rotor principal, cu ajutorul căruia se generează 3 impulsuri la fiecare două rotații ale arborelui cotit (orez. 2.34).
Senzor de baterie (tip plat)
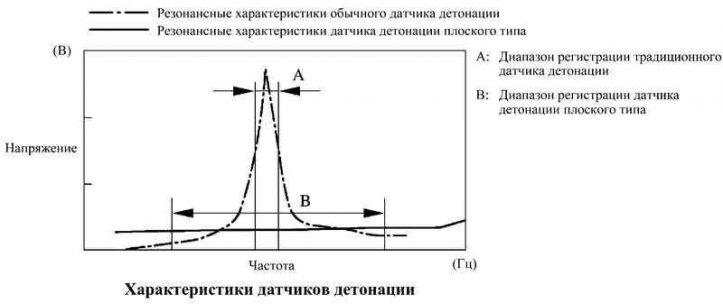
Orez. 2.35. Diagrama de performanță a senzorului de detonare
La senzorii convenționali de detonare (tip rezonant) există o placă, a cărei frecvență de rezonanță coincide cu frecvența detonării motorului. Vă permite să înregistrați oscilații în apropierea frecvenței de rezonanță.
Spre deosebire de acest design, un senzor de detonare plat (tip nerezonant) vă permite să înregistrați vibrațiile într-un interval de frecvență mai larg (aproximativ 6-15 kHz) și are următoarele avantaje.
Frecvența de detonare a motorului variază ușor în funcție de turația motorului. Senzorul de detonație de tip plat permite detectarea vibrațiilor chiar și atunci când frecvența de detonare a motorului se modifică. Astfel, în comparație cu senzorii tradiționali de detonare, posibilitățile de înregistrare a vibrațiilor sunt extinse, ceea ce face posibilă reglarea mai precisă a timpului de aprindere.
Proiecta
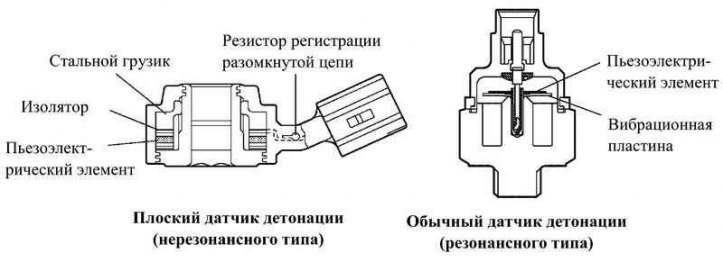
Orez. 2.36. Designul senzorilor de detonare convenționali și plat
Senzorul de detonație de tip plat este atașat la motor cu un știft înșurubat în blocul cilindrilor (orez. 2.36). Orificiul de fixare trece prin centrul senzorului.
În interiorul senzorului, în partea superioară, este instalată o greutate de oțel care, printr-un izolator, se sprijină pe un element piezoelectric.
Un rezistor de detectare a circuitului deschis/scurtcircuit este încorporat în senzor.
Principiul de funcționare
Vibrația detonării motorului este transmisă unei greutăți de oțel, care apasă pe elementul piezoelectric. Rezultatul este o forță electromotoare.
Rezistor de detectare a circuitului deschis/scurtcircuit
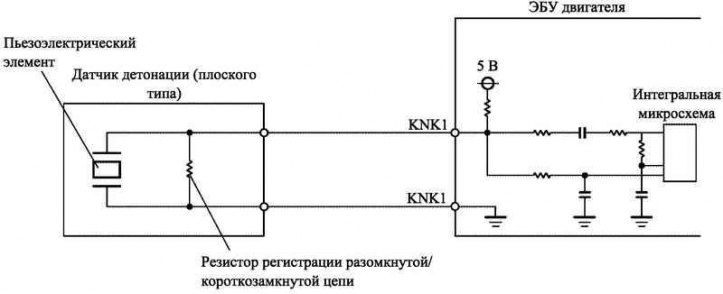
Orez. 2.37. Diagrama bloc al rezistenței de detectare a circuitului deschis/scurtcircuit
Când contactul este pus, rezistorul de detectare a circuitului deschis/scurtcircuit al senzorului de detonare și rezistența din ECU motorului mențin o tensiune constantă la borna KNK1. Tensiunea la terminal este monitorizată în mod constant de circuitul integrat al ECU al motorului. Dacă circuitul dintre senzorul de detonare și ECU al motorului este deschis sau scurtcircuitat, tensiunea la terminalul KNK1 se schimbă și ECU al motorului detectează un circuit deschis/scurt și stochează DTC P0325 în memorie.
Recomandare de intretinere
În legătură cu introducerea unui rezistor de circuit deschis / scurtcircuit în circuit, metoda de verificare a senzorului a fost schimbată.
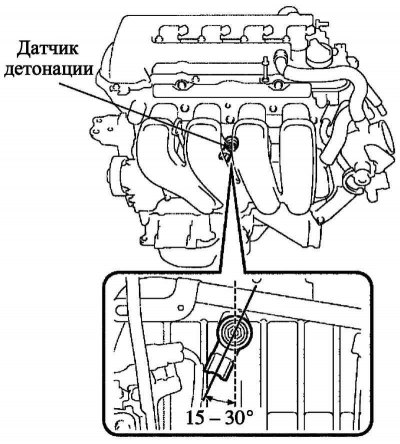
Orez. 2.38. Schema de instalare a senzorului de detonare
Pentru a evita acumularea de umezeală în conector, trebuie instalat un senzor de detonare de tip plat, așa cum se arată în Figura 2.38.
Senzor de poziție a clapetei de accelerație
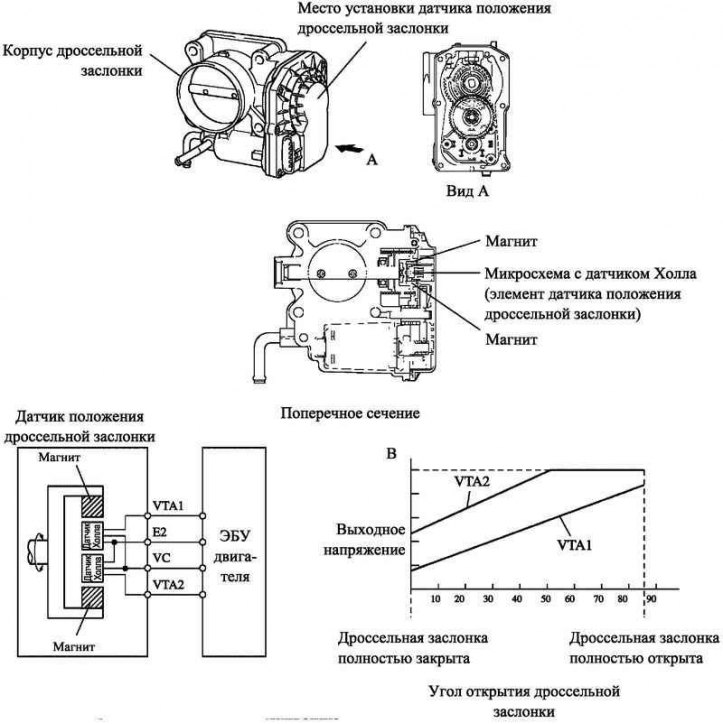
Orez. 2.39. Schema bloc și schema de funcționare a senzorului de poziție a clapetei de accelerație
Senzorul de poziție a clapetei de accelerație este montat pe corpul clapetei. Este conceput pentru a determina unghiul de deschidere al supapei de accelerație. Senzor de poziție a clapetei de accelerație (Senzor Hall) constă dintr-un circuit integrat cu senzori Hall și magneți permanenți care se rotesc în jurul acestuia. Magneții sunt montați în jurul axei supapei de accelerație și se rotesc sincron cu aceasta.
Când clapeta de accelerație se deschide, magneții se rotesc cu ea. Senzorii Hall detectează modificarea fluxului magnetic și generează o tensiune de ieșire de mărimea corespunzătoare la bornele VTA1 și VTA2. Acest semnal este utilizat pentru a genera un semnal de deschidere a clapetei de accelerație către ECU-ul motorului.
Acest design nu numai că asigură o precizie ridicată a detectării poziției clapetei de accelerație, dar este, de asemenea, simplu și fiabil, deoarece utilizează un principiu fără contact. În plus, pentru a îmbunătăți fiabilitatea senzorului, sunt utilizate două sisteme cu caracteristici de ieșire diferite pentru a genera semnale de ieșire.
Recomandare de intretinere
Deoarece senzorul folosește un cip cu senzor Hall, metoda de testare este diferită de metoda de testare pentru un senzor convențional de poziție a clapetei de accelerație.
Senzor de poziție a pedalei de accelerație
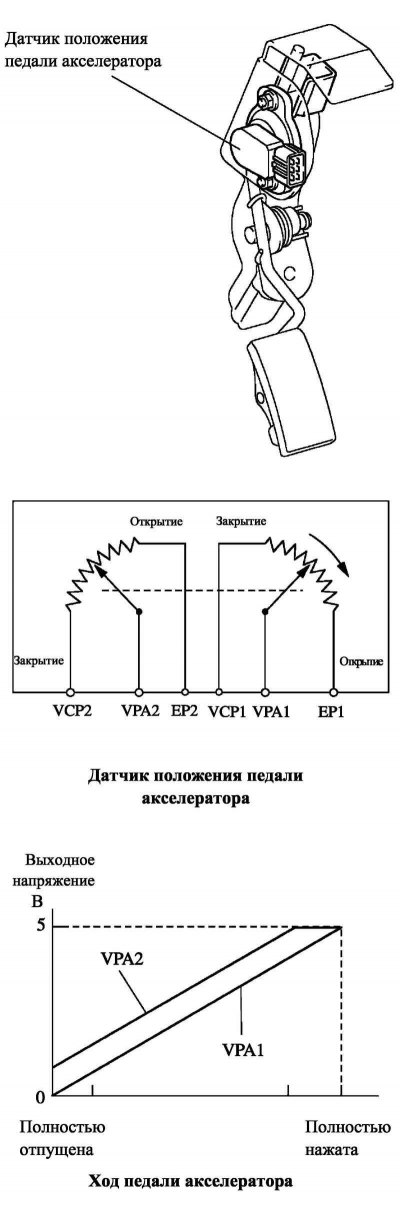
Orez. 2.40. Schema bloc și schema de funcționare a senzorului de poziție a pedalei de accelerație
Senzorul de poziție a pedalei de accelerație transformă cursa pedalei în semnale electrice cu două caracteristici diferite și le transmite ECU-ului motorului. Semnalul VPA1 are o caracteristică liniară și este aplicat pe întreaga cursă a pedalei de accelerație. Semnalul VPA2 are o caracteristică de tensiune polarizată.
Injecție electronică EFI
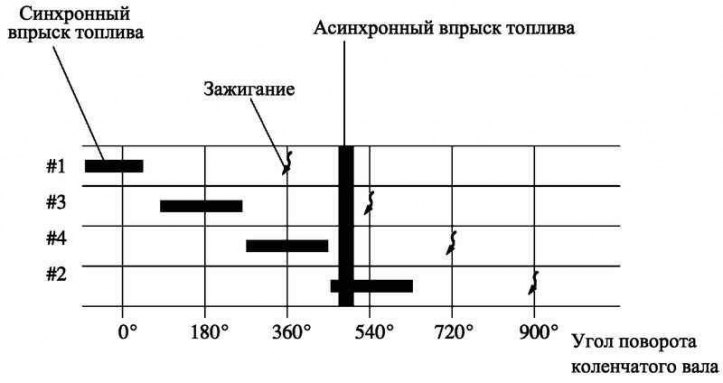
Orez. 2.41. Diagrama injectiilor sincrone si asincrone
Sistemul EFI de tip L detectează direct masa de aer care intră în motor utilizând un contor de masă de aer înfăşurat cu fir.
Se folosește sistemul de injecție distribuită (când combustibilul este injectat în fiecare cilindru o dată la două rotații ale arborelui cotit).
Există două tipuri de injecție de combustibil:
- prima metodă este injecția sincronă, când durata injecției principale este corectată pe baza semnalelor de la senzori. în acest caz, injecția se efectuează în aceeași poziție a arborelui cotit;
- a doua metodă este injecția asincronă, când un singur moment de injecție pentru toate injectoarele este determinat de semnalele de la senzori, indiferent de poziția arborelui cotit. Pentru a reduce uzura motorului și consumul de combustibil, sistemul pornește alimentarea cu combustibil în anumite condiții de conducere.
La temperaturi scăzute ale lichidului de răcire și în timp ce motorul funcționează la turații mici, sistemul asigură injecția de combustibil suplimentar.
Sistem electronic inteligent de control al accelerației ETCS-i
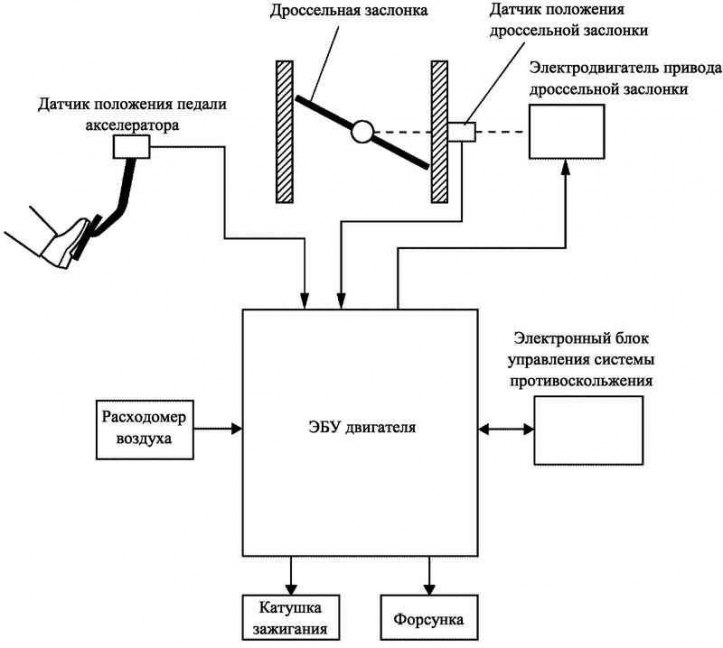
Orez. 2.42. Schema structurală a sistemului
ETCS-i oferă un control excepțional al poziției clapetei de accelerație în toate condițiile de funcționare a motorului. Noile motoare 1ZZ-FE și 3ZZ-FE nu au control mecanic al accelerației, iar pe pedala de accelerație este instalat un senzor de poziție a pedalei.
Într-un sistem convențional de corp de accelerație, unghiul de deschidere a clapetei de accelerație este determinat de cursa pedalei de accelerație. În schimb, în ETCS-i, ECU-ul motorului calculează poziția optimă a clapetei de accelerație pe baza condițiilor de conducere și o setează controlând motorul de antrenare.
Sistemul ETCS-i asigură controlul sistemului de ralanti ISC, al sistemului de control al vitezei de croazieră, al sistemului de control al tracțiunii TRC și al sistemului de control al stabilității VSC.
În cazul unei defecțiuni, sistemul intră în modul de urgență.
Principiul de funcționare
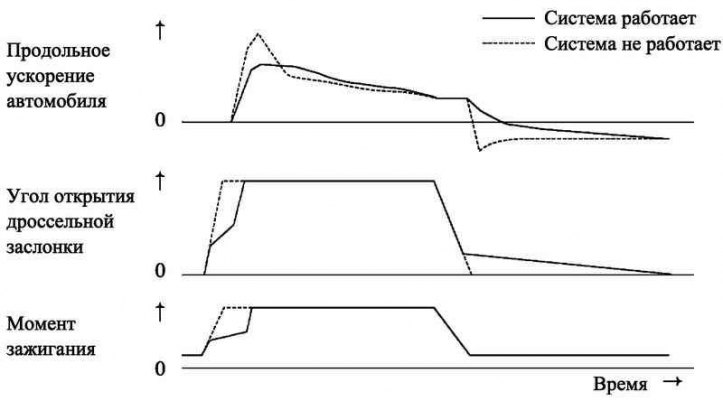
Orez. 2.43. Diagrama de funcționare a sistemului de control în timpul accelerării și decelerației
În funcție de modul de funcționare, ECU-ul motorului determină unghiul de deschidere necesar al clapetei de accelerație și controlează motorul actuatorului clapetei de accelerație. Modurile pentru care este responsabilă ECU-ul motorului sunt enumerate mai jos.
- mod neliniar.
- modul inactiv.
- Controlul clapetei în timpul controlului tracțiunii (TRC).
- Modul de coordonare cu sistemul VSC.
- Cruise control.
Modul neliniar
Sistemul ajustează clapeta de accelerație în poziția optimă în funcție de condițiile de conducere, adică poziția pedalei de accelerație și turația motorului, oferind un control precis al clapetei de accelerație și o conducere confortabilă în toate modurile.
Modul inactiv
ECU-ul motorului reglează poziția clapetei de accelerație pentru a menține turația optimă la ralanti în orice moment.
Controlul accelerației
în timpul funcționării sistemului de control al tracțiunii (TRC)
Dacă controlul tracțiunii este activat (TRC), când alunecarea roții motoare este semnificativă, ECU de control al derapajului trimite un semnal de închidere a accelerației, ajutând astfel la menținerea controlului vehiculului și a tracțiunii pe roți.
Modul de coordonare cu sistemul VSC
Pentru a îmbunătăți eficiența sistemului VSC, poziția clapetei de accelerație este controlată împreună cu ECU de control al derapajului.
Cruise control
ECU al motorului cu ECU integrat pentru controlul vitezei de croazieră controlează direct poziția clapetei de accelerație pentru a menține o viteză constantă.
Funcționarea senzorului de poziție a pedalei de accelerație în regim de urgență
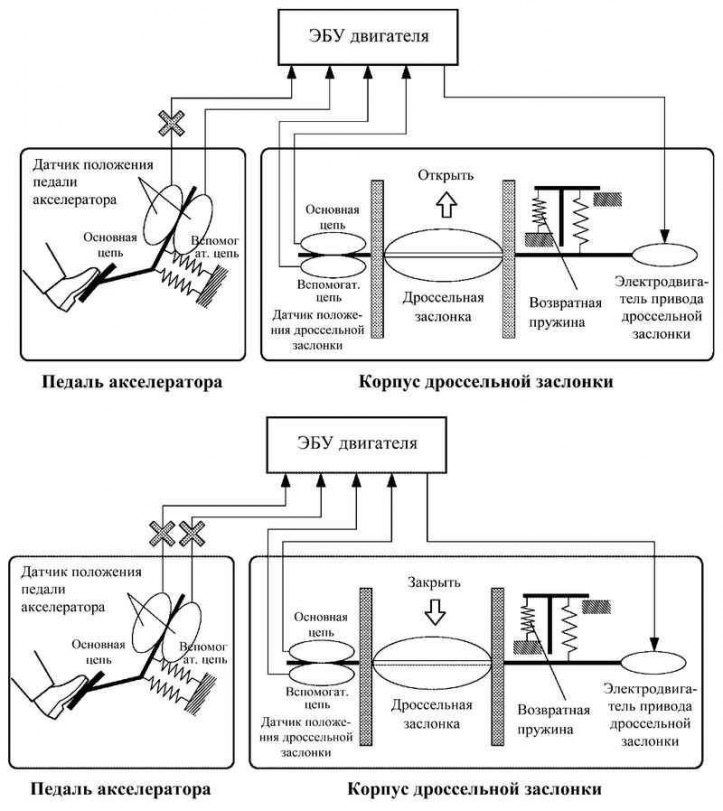
Orez. 2.44. Schema de funcționare a senzorului de poziție a pedalei de accelerație în regim de urgență
Există două circuite pentru transmiterea semnalului senzorului de poziție a pedalei de accelerație (principal și auxiliar). Dacă unul dintre circuitele senzorului se defectează, ECU-ul motorului detectează o diferență incorectă de tensiune între semnalele din cele două circuite și trece în modul de urgență. pentru a menține capacitatea de a conduce vehiculul în modul de urgență, se utilizează un circuit intact pentru a determina poziția pedalei de accelerație.
Dacă ambele circuite ale senzorilor sunt defecte, ECU al motorului recunoaște tensiunile incorecte ale semnalului pe ambele circuite și dezactivează sistemul de control al accelerației. În acest mod, mașina se poate deplasa cu o viteză a arborelui cotit egală cu viteza de ralanti.
Există două circuite pentru transmiterea semnalului senzorului de poziție a clapetei de accelerație (principal și auxiliar). Dacă unul dintre circuitele senzorului se defectează, ECU al motorului detectează o diferență incorectă de tensiune între semnalele din ambele circuite, oprește alimentarea motorului de accelerație și trece în modul de urgență. În acest caz, sub influența unui arc de retur, supapa de accelerație este setată într-o poziție predeterminată ușor deschisă. Astfel, mașina se poate deplasa în regim de urgență. În acest caz, puterea motorului este reglată prin modificarea volumului de combustibil injectat și modificarea momentului de aprindere, în funcție de poziția pedalei de accelerație.
În același mod, controlul va fi efectuat dacă ECU detectează o defecțiune a motorului actuatorului clapetei de accelerație.
Sistem electronic de sincronizare variabilă a supapelor WT-i
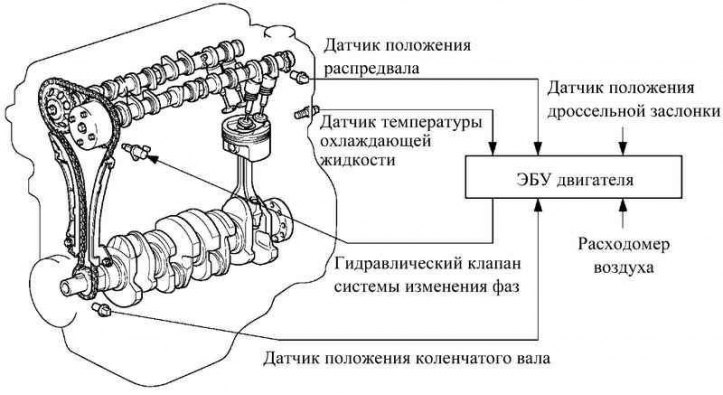
Orez. 2.45. Schema de funcționare a sistemului electronic de modificare a temporizării supapei WT-i
Sistemul VVT-i este conceput pentru a regla unghiul de rotație al arborelui cu came de admisie în intervalul de 40° (unghiul de rotatie al arborelui cotit) și instalarea sincronizarii supapelor, corespunzând optim modurilor de funcționare ale motorului. Sistemul vă permite să creșteți cuplul la orice viteză a arborelui cotit și, de asemenea, ajută la reducerea consumului de combustibil și la reducerea conținutului de substanțe nocive din gazele de eșapament (orez. 2.45).
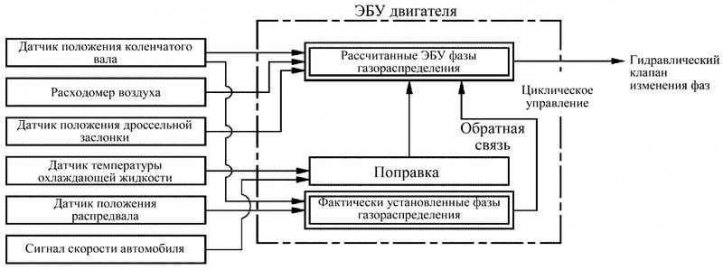
Orez. 2.46. Schema bloc a sistemului electronic de sincronizare variabilă a supapelor WT-i
Pe baza turației motorului, a cantității de aer care intră în motor, a poziției clapetei de accelerație și a temperaturii lichidului de răcire, ECU-ul motorului determină sincronizarea optimă a supapelor pentru toate condițiile de funcționare a motorului și controlează supapa hidraulică de schimbare a fazei. În plus, prin procesarea semnalelor de la senzorii de poziție a arborelui cu came și a arborelui cotit, ECU-ul motorului determină sincronizarea supapelor setată efectiv, oferind feedback în controlul sincronizarii supapelor (orez. 2.46).
Unitate de control WT-i
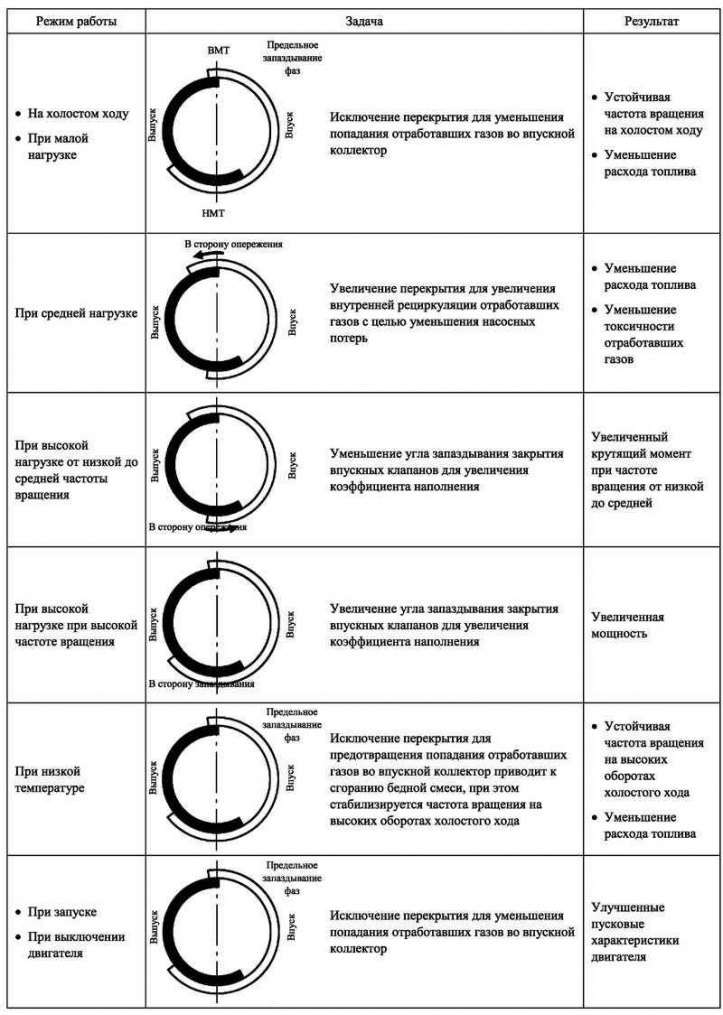
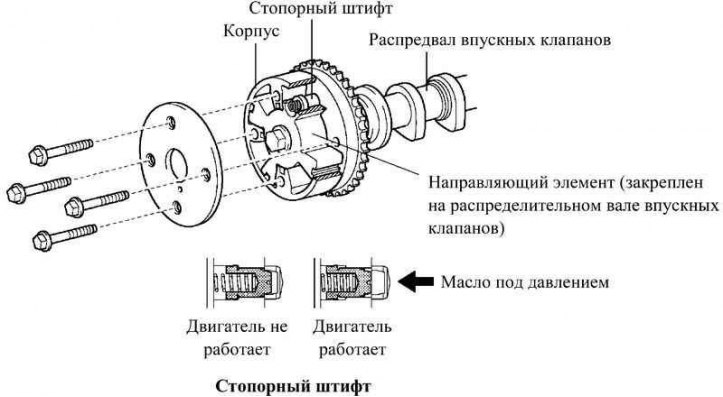
Orez. 2.47. Rezultatul sistemului WT-i
Unitatea de control constă dintr-o carcasă antrenată de un lanț al trenului de supape și o paletă de ghidare conectată la arborele cu came de admisie.
Uleiul sub presiune curge prin orificiul arborelui cu came de admisie către o supapă hidraulică controlată de ECU al motorului. Supapa redistribuie apoi uleiul, în funcție de comenzile ECU, fie către deschiderea avansată, fie către cea întârziată a supapelor de admisie, ceea ce, la rândul său, duce la rotirea elementului de ghidare WT-i, oferind în același timp o schimbare continuă a sincronizarii supapei. a supapelor de admisie.
Când motorul nu funcționează, arborele cu came de admisie este în poziția cea mai întârziată pentru cea mai bună performanță de pornire.
Dacă unitatea de control VVT-i nu este alimentată cu ulei sub presiune imediat după pornirea motorului, știftul de blocare blochează rotația unității de control VVT-i, prevenind detonarea.
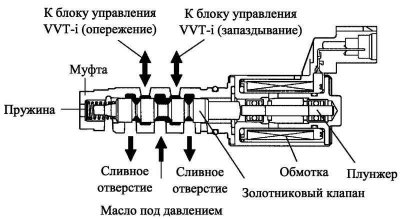
Supapa hidraulica de schimbare a fazei
Supapa hidraulică de schimbare de fază controlează poziția ventilului în conformitate cu comenzile ciclice ale ECU al motorului. Ca rezultat, uleiul sub presiune este furnizat controlerului WT-i pentru a roti arborele cu came înainte sau întârzia. Când motorul nu funcționează, sincronizarea hidraulică variabilă a supapelor este în poziția cea mai întârziată.
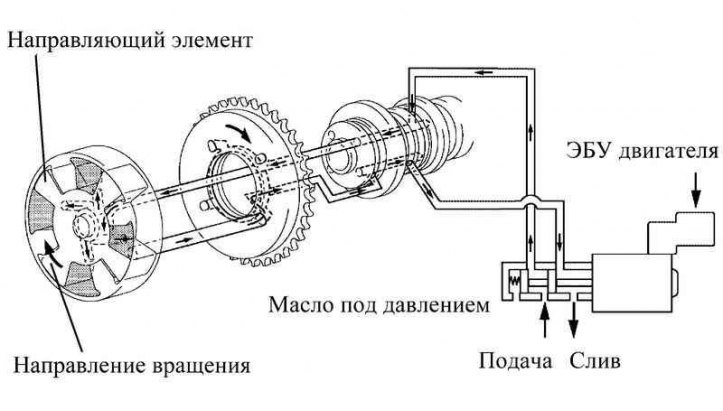
Principiul de funcționare (avans)
Orez. 2.48. Unitate de control WT-i
Dacă supapa hidraulică pentru schimbarea temporizării sub influența semnalelor de avans de la ECU motorului este situată așa cum se arată în Figura 2.48, presiunea rezultată a uleiului este furnizată elementului de ghidare din partea de avans, în timp ce arborele cu came se rotește în direcția de înaintare a unghiul de deschidere al supapelor.
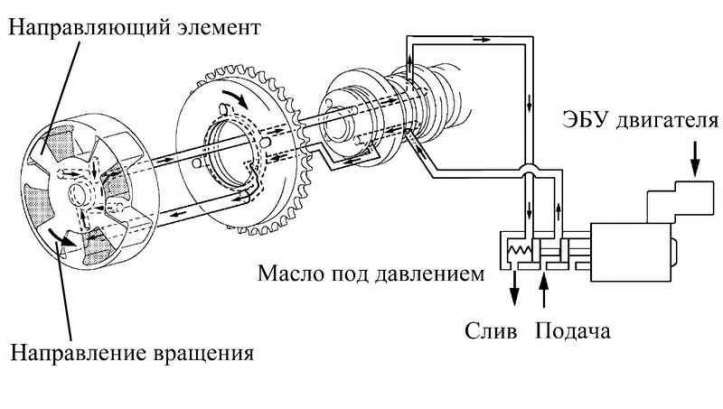
Principiul de funcționare (lag)
Orez. 2.49. Diagrama schimbării fazei supapei cu bobină
Dacă supapa hidraulică pentru schimbarea fazei sub influența semnalelor de întârziere de la ECU motorului este situată așa cum se arată în Figura 2.49, atunci uleiul sub presiune este furnizat elementului de ghidare din partea de întârziere, în timp ce arborele cu came se rotește în direcția supapei. decalajul unghiului de deschidere.
Orez. 2.50. Unghiul de deschidere al supapei direcția de avans
Orez. 2,51. Întârzierea direcției unghiului de deschidere a supapei
Fixarea arborelui în poziția instalată
Odată ce arborele cu came este în poziția dorită, supapa hidraulică a arborelui cu came este în poziție neutră, blocând arborele cu came până când condițiile de conducere se schimbă. În acest fel, sincronizarea supapelor este reglată și se previne momentan scurgerile inutile de ulei de motor.
Controlul pompei de combustibil
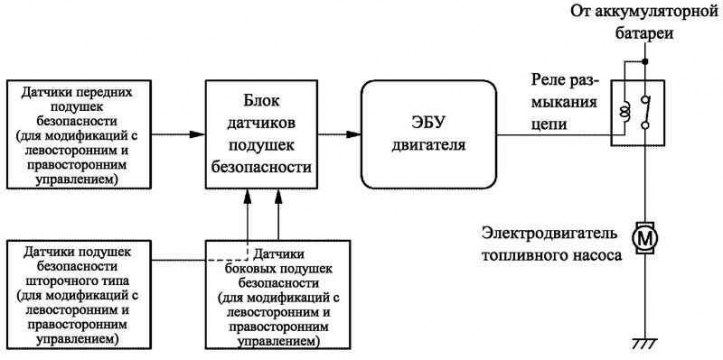
Orez. 2,52. Schema bloc de control al pompei de combustibil
În cazul declanșării unui airbag în cazul unei coliziuni frontale sau laterale, este prevăzută o funcție de întrerupere a combustibilului cu pompa de combustibil oprită. Funcția este activată de semnalul de declanșare a airbag-ului de la unitatea senzor airbag, care este înregistrat de ECU-ul motorului; ECU-ul motorului oprește releul de deschidere a circuitului. După oprirea alimentării cu combustibil, puteți relua și porni motorul rotind cheia din contact de la poziția OFF în poziția ON.
Controlul opririi aparatului de aer condiționat
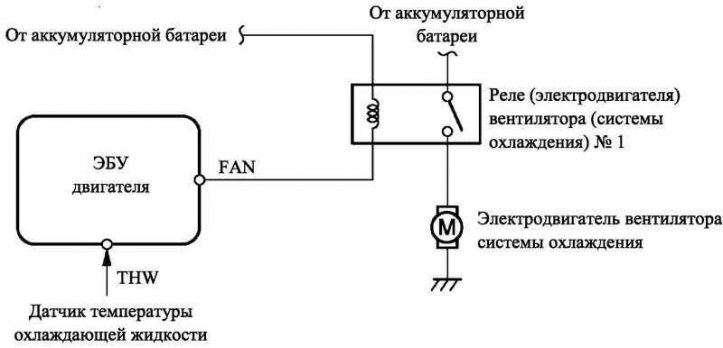
Orez. 2,53. Schema de conectare la modelele fara aer conditionat
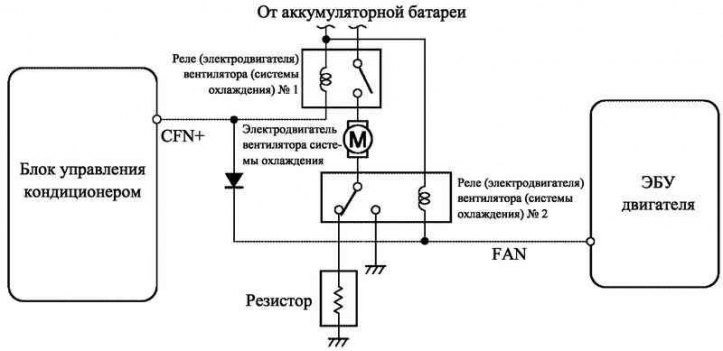
Orez. 2,54. Schema de conectare la modelele cu aer conditionat
La modelele fără aer condiționat, ECU al motorului controlează viteza ventilatorului de răcire pe baza senzorului de temperatură a lichidului de răcire a motorului.
Modelele cu aer condiționat au două viteze ale ventilatorului de răcire: mică și mare. ECU-ul motorului comandă activarea vitezei mari în funcție de semnalele de la senzorul de temperatură a lichidului de răcire și senzorul de presiune a A/C. Controlul vitezei reduse este efectuat de unitatea de control al aerului condiționat.
Funcția de control al pornitorului «Pornire semi-automat»
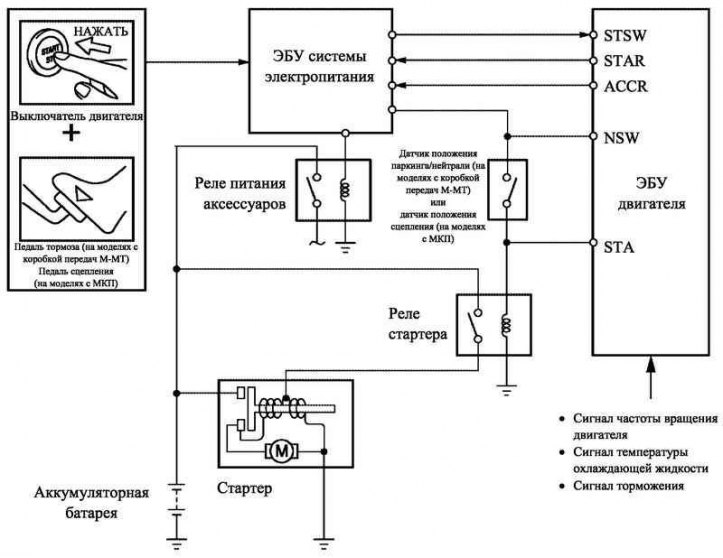
Orez. 2,55. Schema bloc a sistemului de control al demarorului
Noul model de mașină folosește funcția de control al demarorului «Pornire semi-automat». Când butonul de pornire a motorului este apăsat, această funcție este activă până la pornirea motorului. Pedala de frână trebuie apăsată (la modelele cu transmisie manuală multimodală M-MT) sau pedala de ambreiaj (la modelele cu cutie de viteze manuala). Astfel, fiabilitatea pornirii motorului este crescută și este exclusă posibilitatea de funcționare a demarorului după pornirea motorului.
Dacă ECU motorului primește un semnal de pornire de la ECU de putere, sistemul monitorizează semnalul de turație a motorului (NE) și nu oprește demarorul până nu pornește motorul. De asemenea, dacă ECU-ul motorului primește un semnal de pornire de la ECU de putere, dar stabilește că motorul este deja pornit, acesta nu va cupla demarorul.
Principiul de funcționare
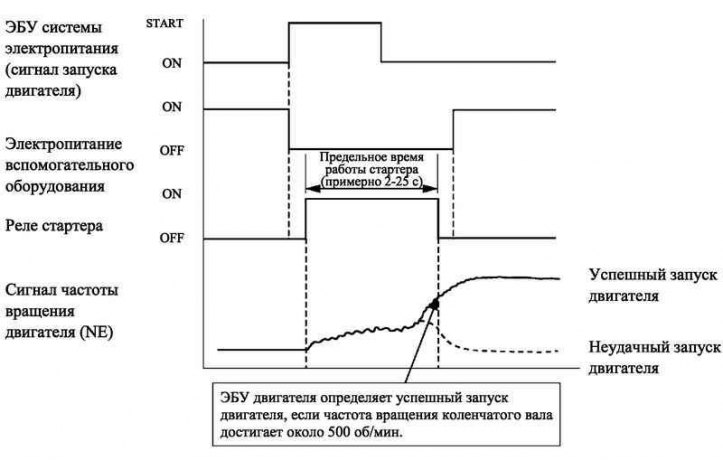
Orez. 2,56. Diagrama de funcționare a sistemului de control al demarorului
După cum se arată în figura 2.56, când ECU-ul motorului primește semnalul de pornire (STSW) de la ECU de putere, ECU-ul motorului trimite semnale STAR și ACCR către ECU de putere. Acesta din urmă, la rândul său, trimite un semnal releului demarorului pentru a porni demarorul. Dacă motorul funcționează deja, ECU-ul motorului nu furnizează semnalele STAR și ACCR ECU-ului de alimentare. Prin urmare, ECU de control al puterii nu alimentează releul demarorului.
După ce demarorul este cuplat și după ce turația motorului depășește aproximativ 500 min-1, ECU-ul motorului stabilește că motorul funcționează și oprește demarorul.
Dacă motorul are o defecțiune și nu pornește, demarorul va funcționa pentru timpul maxim admis, după care se va decupla automat. Durata maximă de funcționare a demarorului este de aproximativ 2 până la 25 de secunde, în funcție de temperatura lichidului de răcire. Dacă temperatura lichidului de răcire este foarte scăzută, demarorul funcționează timp de aproximativ 25 de secunde, iar când motorul este suficient de cald, demarorul funcționează nu mai mult de 2 secunde.
Pentru a elimina sarcina suplimentară în timpul tensiunii instabile în timpul pornirii motorului, sistemul întrerupe alimentarea echipamentelor auxiliare în acest timp.
Sistemul oferă următoarele niveluri de protecție:
- dacă motorul este deja pornit, demarorul nu se va porni chiar dacă cheia de contact este rotită în poziția START;
- chiar dacă șoferul ține cheia de contact în poziția START, după ce motorul este pornit de la o jumătate de tură, ECU-ul motorului va opri demarorul când turația motorului atinge aproximativ 1200 rpm-1 sau mai mult.;
- chiar dacă șoferul ține cheia de contact în poziția START și motorul nu pornește, ECU-ul motorului va opri demarorul după aproximativ 30 de secunde;
- Dacă ECU-ul motorului nu primește un semnal de turație a motorului în timp ce demarorul funcționează, va înceta imediat să emită semnalele STAR și ACCR.
Diagnosticare
Sistem de diagnosticare tip EURO-OBD (Sistemul european de diagnosticare la bord), utilizat pe motoarele 1ZZ-FE și 3ZZ-FE, îndeplinește cerințele reglementărilor europene.
Dacă ECU-ul motorului detectează o problemă, diagnosticează și înregistrează nodul cu probleme. În plus, pentru a informa șoferul pe tabloul de bord, lampa de avertizare a motorului Chk Eng se aprinde constant sau începe să clipească.
ECU-ul motorului stochează, de asemenea, DTC-uri electronice pentru toate defecțiunile. Aceste coduri pot fi citite folosind testerul de microprocesor P.
Toate DTC-urile respectă codurile SAE. Unele DTC au fost împărțite în sub-secțiuni mai mici decât anterior, cu noi DTC-uri alocate sub-secțiunilor.
Recomandare de intretinere
Pentru a șterge DTC-urile electronice stocate în memoria ECU a motorului, utilizați testerul inteligent II sau deconectați borna bateriei sau scoateți siguranța EFI pentru cel puțin un minut.
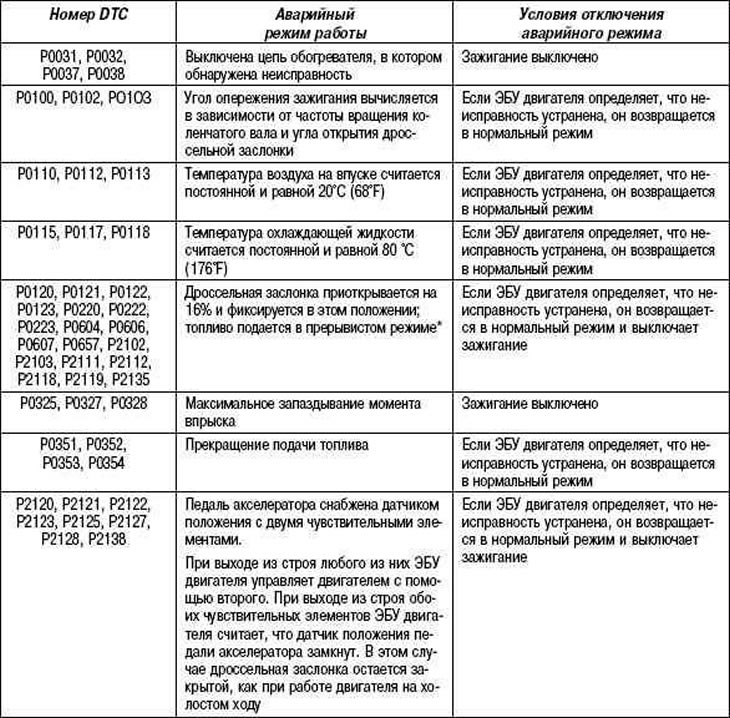
Funcționarea sistemului în modul de urgență
Când este detectată o defecțiune, ECU-ul motorului se oprește sau pune motorul în funcționare de urgență conform datelor înregistrate în memorie.
Tabelul 2.9. Funcționarea sistemului în modul de urgență