Oblikovati
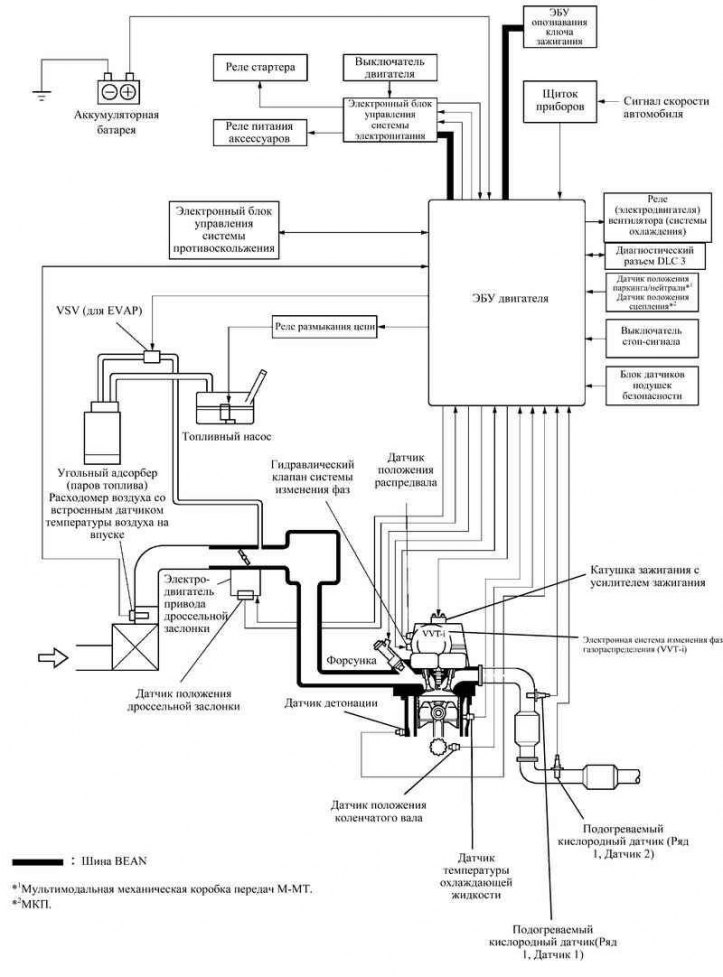
Riža. 2.30. Strukturni dijagram sustava upravljanja motorom
Slika 2.30 prikazuje konfiguraciju elektroničkog sustava upravljanja motorom.
Glavne komponente sustava upravljanja motorom
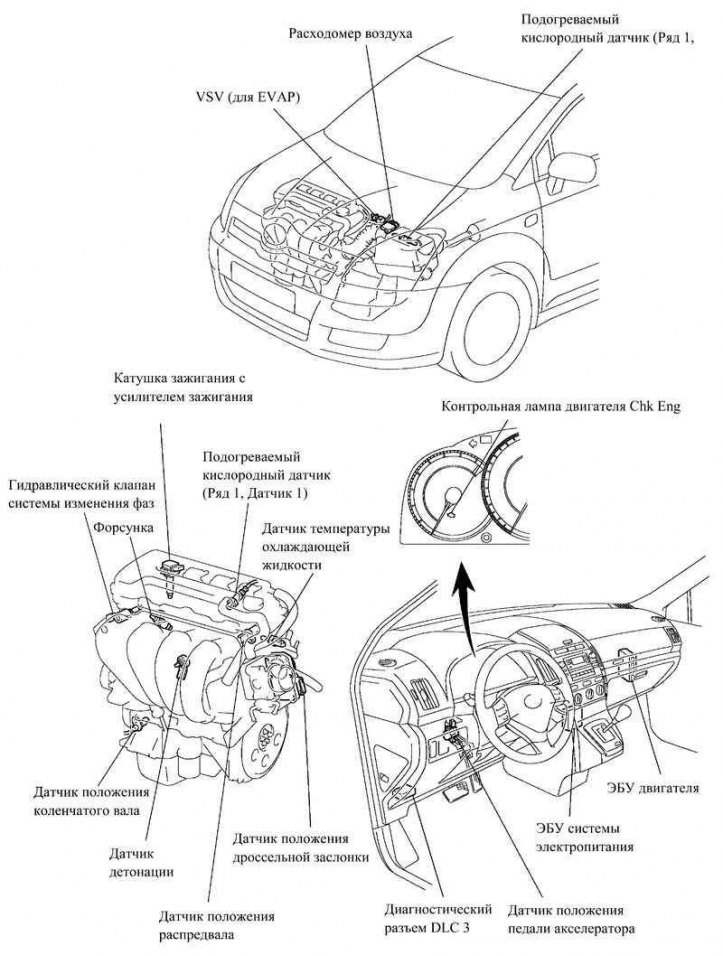
Riža. 2.31. Položaj glavnih komponenti sustava upravljanja motorom 1ZZ-FE I 3ZZ-FE
Upravljački sustavi motora 1ZZ-FE i 3ZZ-FE uključuju jedinice navedene u tablici 2.6.
Tablica 2.6. Glavne komponente sustava upravljanja motorom
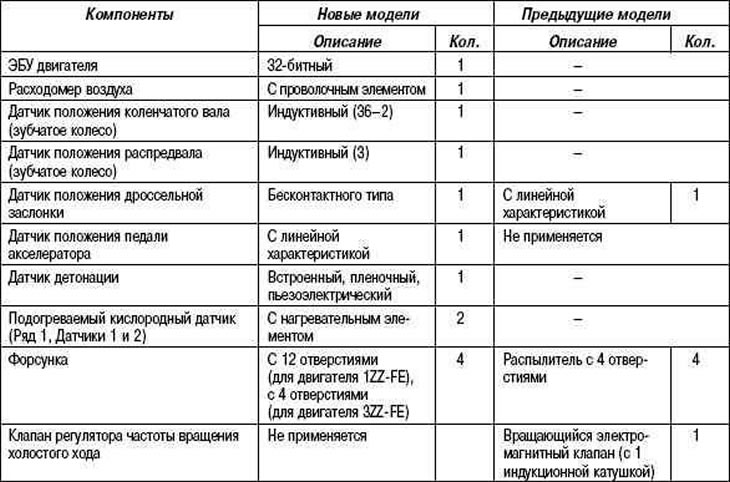
ECU motora
ECU motora temelji se na 32-bitnom procesoru.
Senzor kisika i senzor omjera zraka i goriva
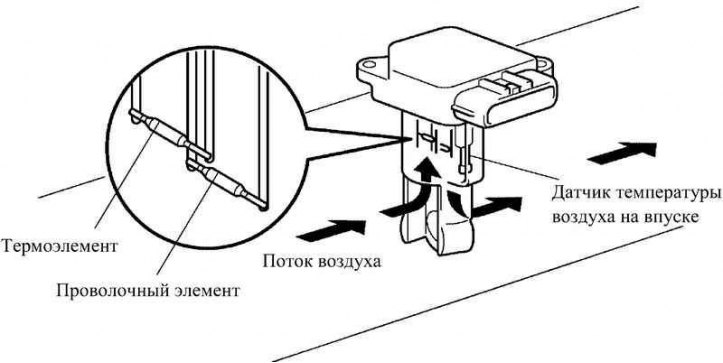
Riža. 2.32. Senzor kisika i senzor omjera zraka i goriva
U usisnu granu ugrađeni su senzor kisika male veličine i senzor omjera zraka i goriva male mase. Dio zraka koji ulazi u motor prolazi kroz mjerno područje senzora (riža. 2.32). Budući da se masa i protok zraka koji ulazi u motor izravno mjere, povećava se točnost mjerenja i smanjuje otpor koji senzor stvara u usisnom razvodniku.
Senzor ima ugrađen senzor temperature zraka.
Senzor položaja radilice
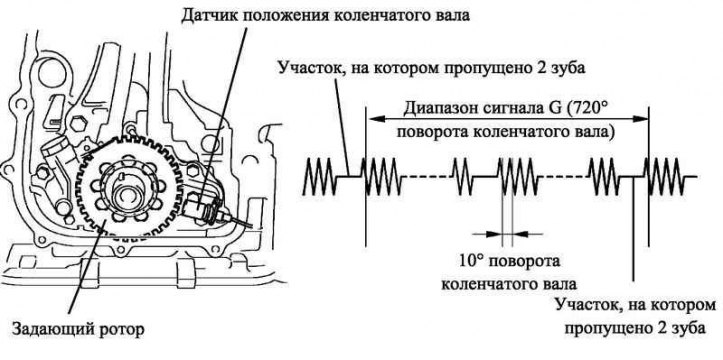
Riža. 2.33. senzor položaja radilice
Pogonski rotor radilice ima 34 zuba i dio gdje nedostaju 2 zuba. Senzor položaja radilice šalje signal svakih 10°, a gornja mrtva točka određena je područjem s nedostajućim zubima (riža. 2.33).
Senzor položaja bregastog vratila
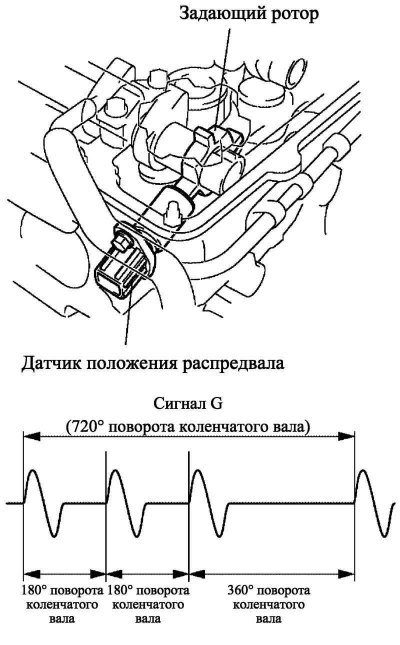
Riža. 2.34. Senzor položaja bregastog vratila
Za određivanje položaja na usisnoj bregastom vratilu ugrađen je glavni rotor uz pomoć kojeg se generiraju 3 impulsa za svaka dva okretaja radilice (riža. 2.34).
Senzor kucanja (ravni tip)
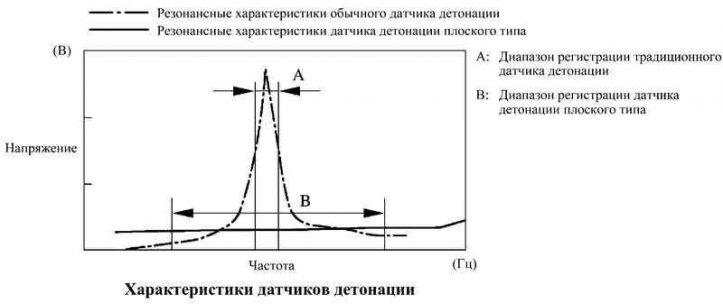
Riža. 2.35. Tablica performansi senzora detonacije
U konvencionalnim senzorima detonacije (rezonantnog tipa) postoji ploča, čija se rezonantna frekvencija podudara s frekvencijom detonacije motora. Omogućuje registraciju oscilacija u blizini rezonantne frekvencije.
Za razliku od ovog dizajna, ravni senzor za kucanje (nerezonantnog tipa) omogućuje registraciju vibracija u širem frekvencijskom rasponu (otprilike 6–15 kHz) i ima sljedeće prednosti.
Učestalost detonacije motora lagano varira s brzinom motora. Plosnati senzor detonacije omogućuje otkrivanje vibracija čak i kada se frekvencija detonacije motora mijenja. Dakle, u usporedbi s tradicionalnim senzorima detonacije, proširene su mogućnosti registracije vibracija, što omogućuje točnije podešavanje vremena paljenja.
Oblikovati
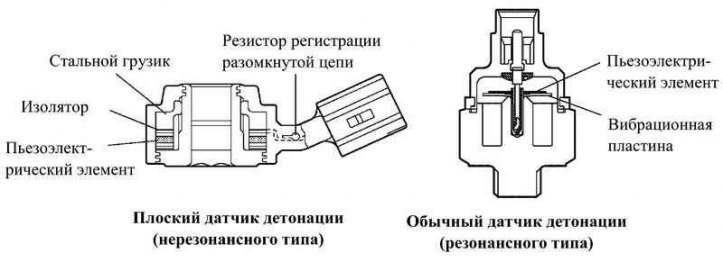
Riža. 2.36. Dizajn konvencionalnih i ravnih senzora detonacija
Ravni senzor detonacije pričvršćen je na motor s vijkom uvijenim u blok cilindra (riža. 2.36). Otvor za klin prolazi kroz središte senzora.
Unutar senzora, u njegovom gornjem dijelu, ugrađen je čelični uteg koji se preko izolatora oslanja na piezoelektrični element.
Otpornik za detekciju prekida/kratkog spoja ugrađen je u senzor.
Princip rada
Vibracija detonacije motora prenosi se na čelični uteg, koji pritišće piezoelektrični element. Rezultat je elektromotorna sila.
Otpornik za otkrivanje otvorenog/kratkog spoja
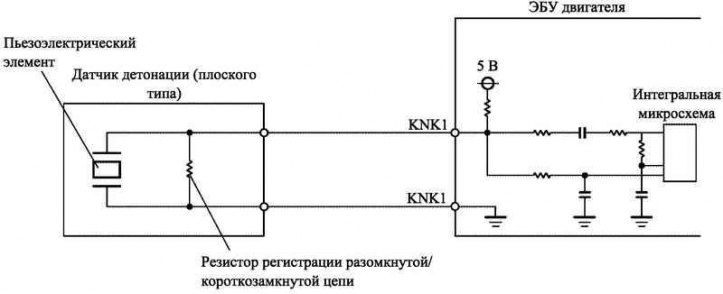
Riža. 2.37. Blok dijagram otpornika za otkrivanje otvorenog/kratkog spoja
Kada je paljenje uključeno, otpornik za otkrivanje prekida/kratkog spoja senzora detonacije i otpornik u ECU motora održavaju konstantan napon na priključku KNK1. Napon na stezaljci stalno nadzire integrirani krug ECU motora. Ako je strujni krug između osjetnika detonacije i ECU motora prekinut ili kratko spojen, napon na priključku KNK1 se mijenja i ECU motora otkriva prekid/kratki spoj i pohranjuje DTC P0325 u memoriju.
Preporuka za održavanje
U vezi s uvođenjem otpornika otvorenog / kratkog spoja u krug, promijenjen je način provjere senzora.
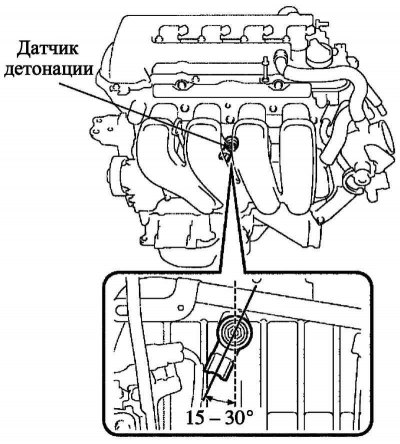
Riža. 2.38. Shema ugradnje senzora kucanja
Kako bi se izbjeglo nakupljanje vlage u konektoru, treba instalirati senzor detonacije ravnog tipa, kao što je prikazano na slici 2.38.
Senzor položaja leptira za gas
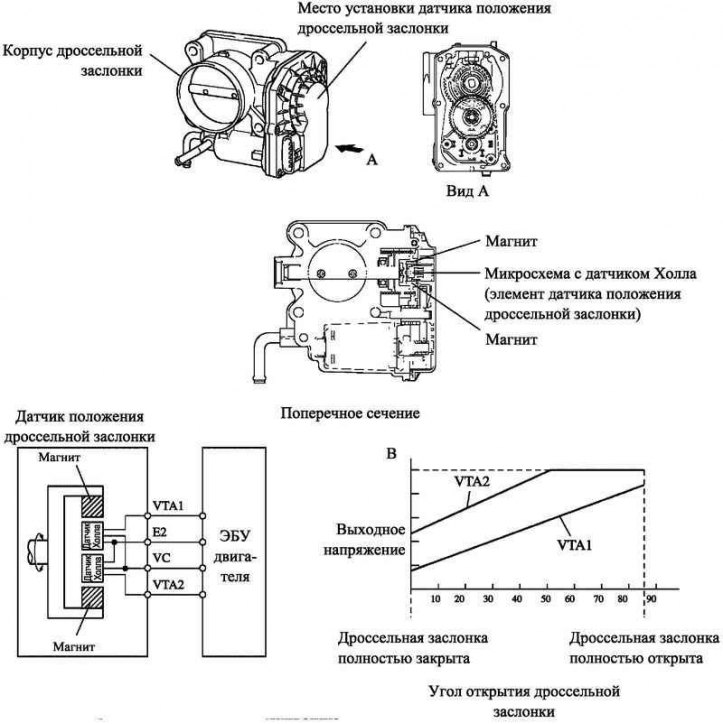
Riža. 2.39. Blok shema i shema rada senzora položaja leptira za gas
Senzor položaja leptira za gas montiran je na tijelo leptira za gas. Dizajniran je za određivanje kuta otvaranja prigušnog ventila. Senzor položaja leptira za gas (Hallov senzor) sastoji se od integriranog kruga s Hallovim senzorima i permanentnim magnetima koji rotiraju oko njega. Magneti su postavljeni oko osi ventila za gas i rotiraju se sinkrono s njim.
Kada se gas otvori, magneti se okreću s njim. Hallovi senzori detektiraju promjenu magnetskog toka i generiraju izlazni napon odgovarajuće veličine na stezaljkama VTA1 i VTA2. Ovaj signal se koristi za generiranje signala otvaranja leptira za gas ECU-u motora.
Ovaj dizajn ne samo da osigurava visoku točnost detekcije položaja leptira za gas, već je također jednostavan i pouzdan jer koristi beskontaktni princip. Dodatno, kako bi se poboljšala pouzdanost senzora, koriste se dva sustava s različitim izlaznim karakteristikama za generiranje izlaznih signala.
Preporuka za održavanje
Budući da senzor koristi čip Hallovog senzora, metoda ispitivanja razlikuje se od metode ispitivanja za konvencionalni senzor položaja leptira za gas.
Senzor položaja papučice gasa
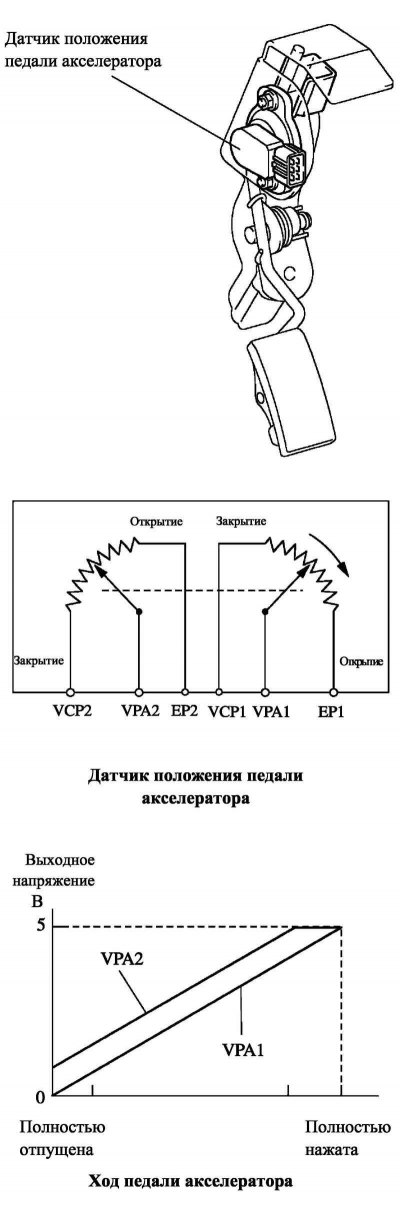
Riža. 2.40. Blok shema i shema rada senzora položaja papučice gasa
Senzor položaja papučice gasa pretvara hod papučice u električne signale s dvije različite karakteristike i prenosi ih u ECU motora. Signal VPA1 ima linearnu karakteristiku i primjenjuje se tijekom cijelog hoda papučice gasa. Signal VPA2 ima prednaponsku karakteristiku.
EFI elektronsko ubrizgavanje
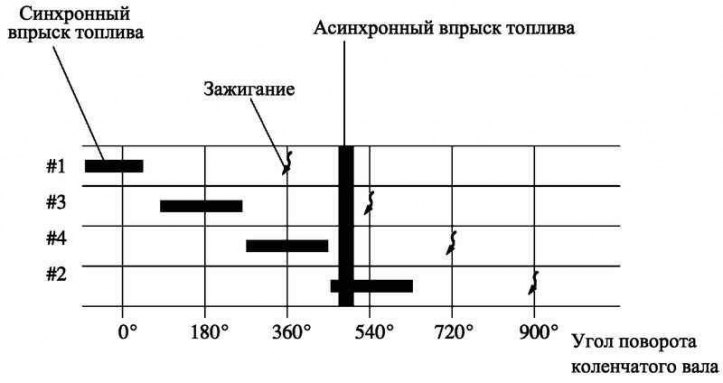
Riža. 2.41. Dijagram sinkronog i asinkronog ubrizgavanja
Sustav EFI tipa L izravno očitava masu zraka koji ulazi u motor pomoću žičanog mjerača mase zraka.
Koristi se distribuirani sustav ubrizgavanja (kada se gorivo ubrizgava u svaki cilindar jednom svaka dva okretaja koljenastog vratila).
Postoje dvije vrste ubrizgavanja goriva:
- prva metoda je sinkrono ubrizgavanje, kada se glavno trajanje ubrizgavanja korigira na temelju signala sa senzora. u ovom slučaju, ubrizgavanje se provodi u istom položaju radilice;
- druga metoda je asinkrono ubrizgavanje, kada se jedan moment ubrizgavanja za sve mlaznice određuje signalima senzora, bez obzira na položaj koljenastog vratila. Kako bi se smanjilo trošenje motora i potrošnja goriva, sustav uključuje dovod goriva u određenim uvjetima vožnje.
Pri niskim temperaturama rashladne tekućine i dok motor radi pri malim brzinama, sustav osigurava dodatno ubrizgavanje goriva.
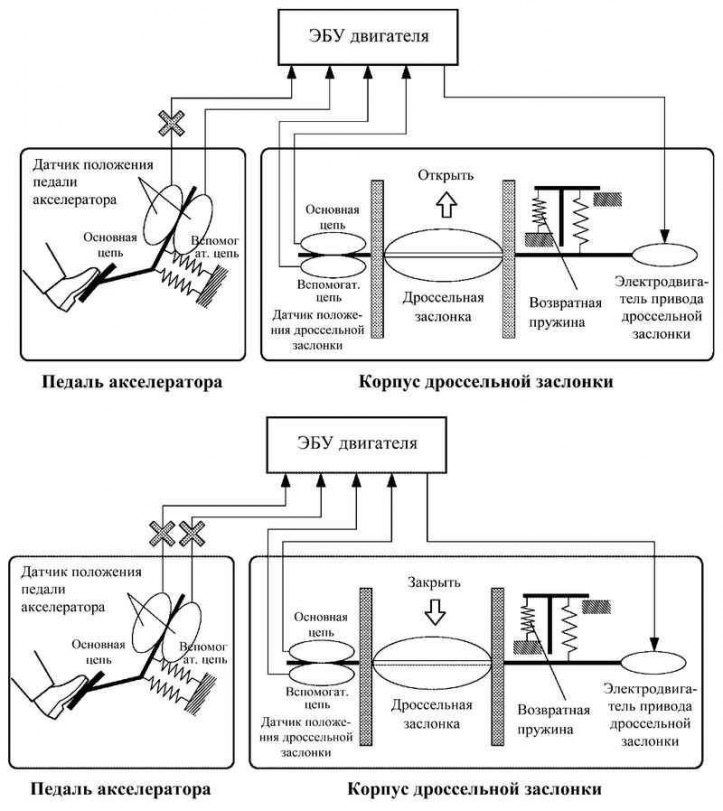
Inteligentni elektronički sustav kontrole gasa ETCS-i
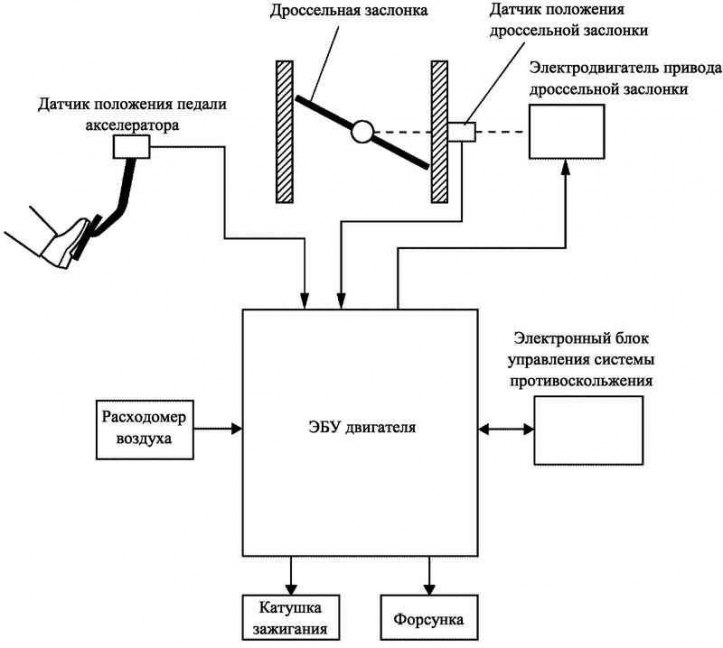
Riža. 2.42. Strukturni dijagram sustava
ETCS-i pruža izuzetnu kontrolu položaja leptira za gas u svim radnim uvjetima motora. Novi motori 1ZZ-FE i 3ZZ-FE nemaju mehaničku kontrolu gasa, a senzor položaja papučice ugrađen je na papučicu gasa.
U konvencionalnom sustavu kućišta leptira za gas, kut otvaranja leptira za gas određen je hodom papučice gasa. Nasuprot tome, u ETCS-i, ECU motora izračunava optimalni položaj leptira za gas na temelju uvjeta vožnje i postavlja ga upravljanjem pogonskog motora.
Sustav ETCS-i osigurava kontrolu ISC sustava praznog hoda, sustava tempomata, TRC sustava kontrole proklizavanja i VSC sustava kontrole stabilnosti.
U slučaju kvara, sustav prelazi u hitni način rada.
Princip rada
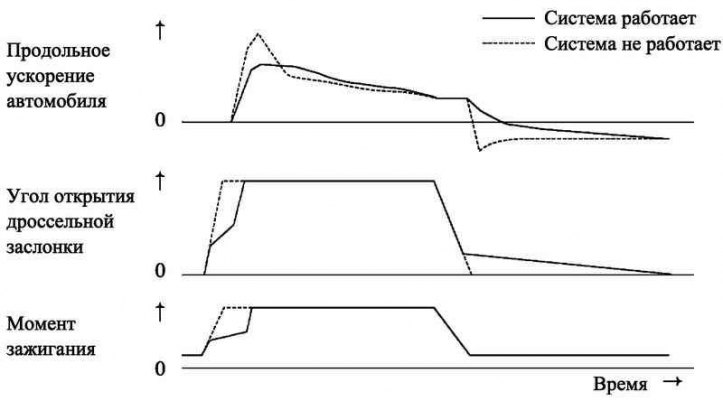
Riža. 2.43. Dijagram rada upravljačkog sustava tijekom ubrzavanja i usporavanja
Ovisno o načinu rada, ECU motora određuje potrebni kut otvaranja leptira za gas i upravlja motorom pokretača leptira za gas. Dolje su navedeni načini rada za koje je odgovoran ECU motora.
- nelinearni način rada.
- način mirovanja.
- Kontrola gasa tijekom kontrole proklizavanja (TRC).
- Način koordinacije s VSC sustavom.
- Tempomat.
Nelinearni način rada
Sustav prilagođava papučicu gasa optimalnom položaju prema uvjetima vožnje, tj. položaju papučice gasa i brzini motora, osiguravajući preciznu kontrolu gasa i udobnu vožnju u svim modovima.
Način mirovanja
ECU motora regulira položaj leptira za gas kako bi cijelo vrijeme održao optimalnu brzinu praznog hoda.
Kontrola gasa
tijekom rada sustava kontrole proklizavanja (TRC)
Ako je kontrola proklizavanja uključena (TRC), kada je proklizavanje pogonskog kotača značajno, ECU za kontrolu proklizavanja šalje signal za zatvaranje leptira za gas, čime pomaže u održavanju kontrole nad vozilom i vuče na kotačima.
Način koordinacije s VSC sustavom
Kako bi se poboljšala učinkovitost VSC sustava, položaj zaklopke za gas kontrolira se zajedno s ECU-om za kontrolu proklizavanja.
Tempomat
ECU motora s integriranim ECU tempomata izravno kontrolira položaj leptira za gas kako bi se održala konstantna brzina.
Rad senzora položaja papučice gasa u hitnom načinu rada
Riža. 2.44. Shema rada senzora položaja papučice gasa u hitnom načinu rada
Postoje dva kruga za prijenos signala senzora položaja papučice gasa (glavni i pomoćni). Ako jedan od krugova osjetnika zakaže, ECU motora detektira neispravnu razliku napona između signala u dva kruga i prebacuje se u hitni način rada. kako bi se održala sposobnost upravljanja vozilom u hitnom načinu rada, koristi se netaknuti krug za određivanje položaja papučice gasa.
Ako su oba kruga osjetnika neispravna, ECU motora prepoznaje neispravne napone signala na oba kruga i onemogućuje sustav kontrole leptira za gas. U ovom načinu rada automobil se može kretati brzinom radilice koja je jednaka brzini praznog hoda.
Postoje dva kruga za prijenos signala senzora položaja zaklopke za gas (glavni i pomoćni). Ako jedan od krugova osjetnika pokvari, ECU motora detektira neispravnu razliku napona između signala u oba kruga, isključuje napajanje motora leptira za gas i prebacuje se u hitni način rada. U tom slučaju, pod utjecajem povratne opruge, prigušni ventil se postavlja u unaprijed određeni lagano otvoreni položaj. Dakle, automobil se može kretati u hitnom načinu rada. U ovom slučaju, snaga motora se regulira promjenom volumena ubrizganog goriva i promjenom vremena paljenja, ovisno o položaju papučice gasa.
U istom načinu rada, kontrola će se provesti ako ECU detektira neispravnost motora pokretača leptira za gas.
Elektronički promjenjivi sustav upravljanja ventilima WT-i
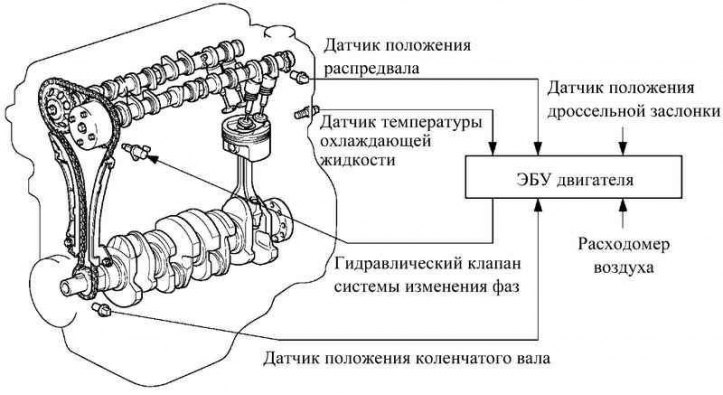
Riža. 2.45. Shema rada elektroničkog sustava za promjenu vremena ventila WT-i
VVT-i sustav dizajniran je za podešavanje kuta rotacije usisne bregaste osovine u rasponu od 40° (kut zakretanja koljenastog vratila) i ugradnja vremena ventila, optimalno u skladu s načinima rada motora. Sustav vam omogućuje povećanje okretnog momenta pri bilo kojoj brzini radilice, a također pomaže u smanjenju potrošnje goriva i smanjenju sadržaja štetnih tvari u ispušnim plinovima (riža. 2.45).
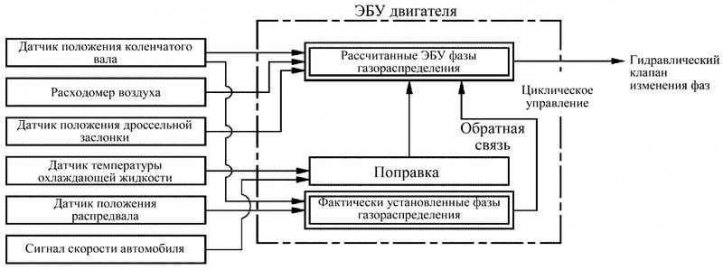
Riža. 2.46. Blok dijagram elektroničkog varijabilnog sustava upravljanja ventilima WT-i
Na temelju brzine motora, količine zraka koji ulazi u motor, položaja leptira za gas i temperature rashladne tekućine, ECU motora određuje optimalno vrijeme rada ventila za sve radne uvjete motora i kontrolira hidraulički ventil za promjenu faze. Osim toga, obradom signala sa senzora položaja bregastog vratila i radilice, ECU motora određuje stvarno postavljeno vrijeme otvaranja ventila, dajući povratnu informaciju u kontroli upravljanja ventilom (riža. 2.46).
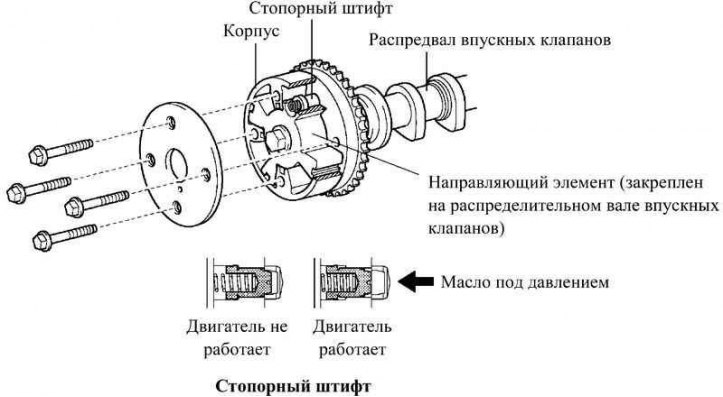
WT-i upravljačka jedinica
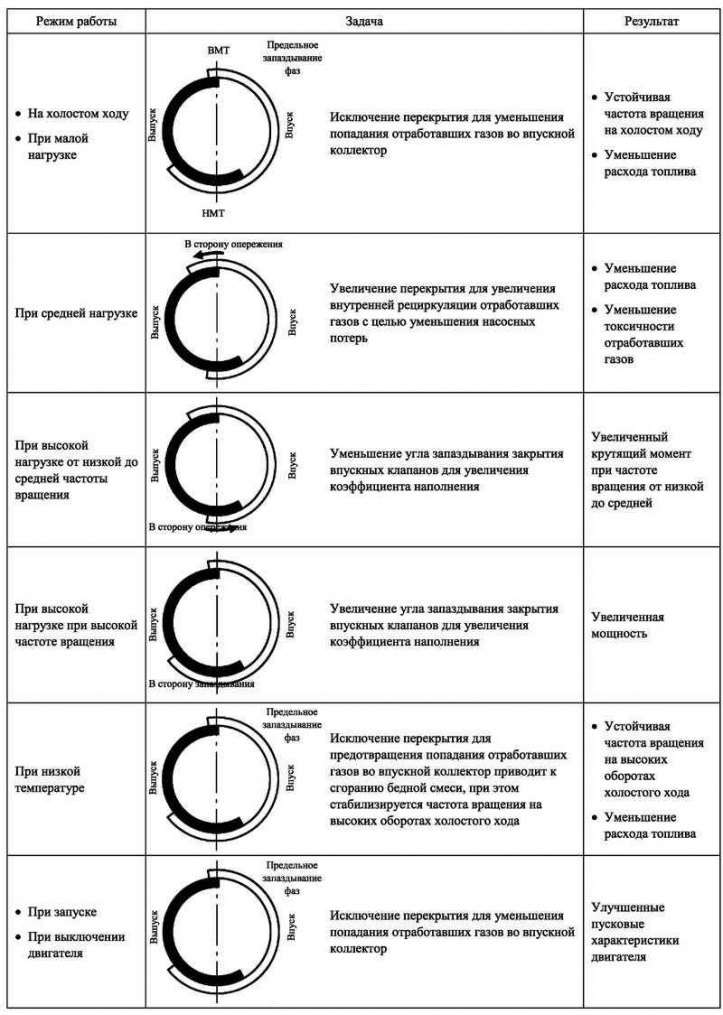
Riža. 2.47. Rezultat WT-i sustava
Upravljačka jedinica sastoji se od kućišta koje pokreće lanac ventila i vodeće lopatice spojene na usisnu bregastu osovinu.
Ulje pod tlakom teče kroz otvor usisne bregaste osovine do hidrauličkog ventila kojim upravlja ECU motora. Ventil zatim redistribuira ulje, ovisno o naredbama ECU-a, na napredno ili odgođeno otvaranje usisnih ventila, što zauzvrat dovodi do rotacije WT-i elementa za vođenje, dok pruža bezstupanjsku promjenu vremena ventila usisnih ventila.
Kada motor ne radi, usisna bregasta osovina je u svom najusporenijem položaju radi najboljeg pokretanja.
Ako se upravljačka jedinica VVT-i ne opskrbi uljem pod tlakom odmah nakon pokretanja motora, zatik za blokiranje blokira rotaciju upravljačke jedinice VVT-i, sprječavajući detonaciju.
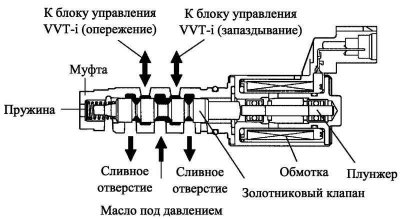
Hidraulički ventil za promjenu faze
Hidraulički ventil za promjenu faze kontrolira položaj kalemnog ventila u skladu s cikličkim naredbama ECU motora. Kao rezultat toga, ulje pod tlakom dovodi se u upravljač WT-i za okretanje bregastog vratila prema naprijed ili usporenje. Kad motor ne radi, hidraulički varijabilni razvod ventila je u najusporenijem položaju.
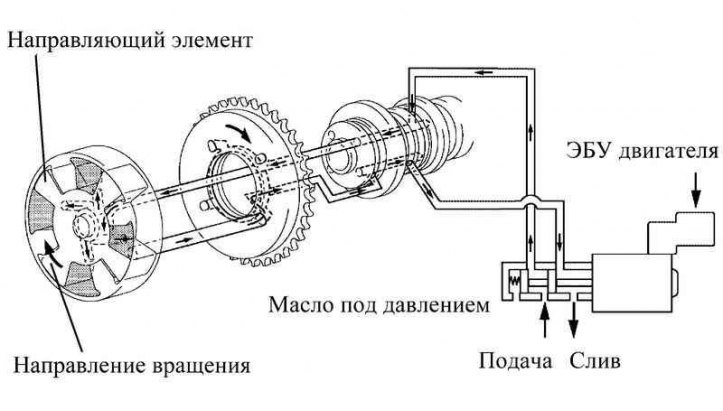
Princip rada (unaprijed)
Riža. 2.48. WT-i upravljačka jedinica
Ako je hidraulički ventil za promjenu vremena pod utjecajem signala unaprijed iz ECU motora smješten kao što je prikazano na slici 2.48, rezultirajući tlak ulja dovodi se na element vodilice sa strane napredovanja, dok se bregasto vratilo okreće u smjeru napredovanja kut otvaranja ventila.
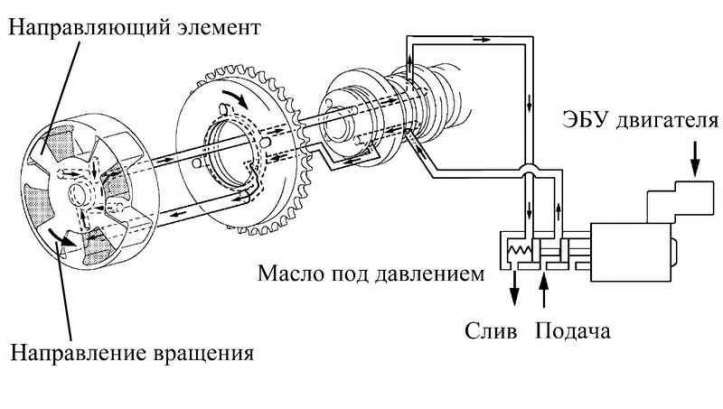
Princip rada (zaostajanje)
Riža. 2.49. Dijagram promjene faze kalemnog ventila
Ako je hidraulički ventil za promjenu faze pod utjecajem signala kašnjenja iz ECU motora smješten kao što je prikazano na slici 2.49, tada se ulje pod tlakom dovodi do elementa za vođenje sa strane kašnjenja, dok se bregasto vratilo okreće u smjeru ventila. kut otvaranja lag.
Riža. 2.50. Smjer napredovanja kuta otvaranja ventila
Riža. 2.51. Smjer kašnjenja kuta otvaranja ventila
Učvršćivanje osovine u instaliranom položaju
Nakon što je bregasto vratilo u željenom položaju, hidraulički ventil bregastog vratila je u neutralnom položaju, blokirajući bregasto vratilo dok se uvjeti vožnje ne promijene. Na taj način se regulira vrijeme otvaranja ventila i trenutno sprječava nepotrebno istjecanje motornog ulja.
Kontrola pumpe goriva
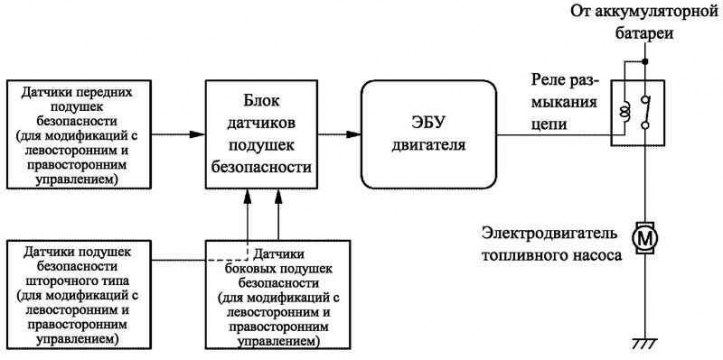
Riža. 2.52. Blok dijagram upravljanja pumpom za gorivo
U slučaju aktiviranja zračnog jastuka u frontalnom ili bočnom sudaru, omogućena je funkcija prekida dovoda goriva s isključenom pumpom za gorivo. Funkcija se aktivira signalom aktiviranja zračnog jastuka iz jedinice senzora zračnog jastuka, koji registrira ECU motora; ECU motora isključuje relej za otvaranje kruga. Nakon isključivanja dovoda goriva, možete nastaviti i pokrenuti motor okretanjem ključa u kontaktnoj bravi iz položaja OFF u položaj ON.
Kontrola isključivanja klima uređaja
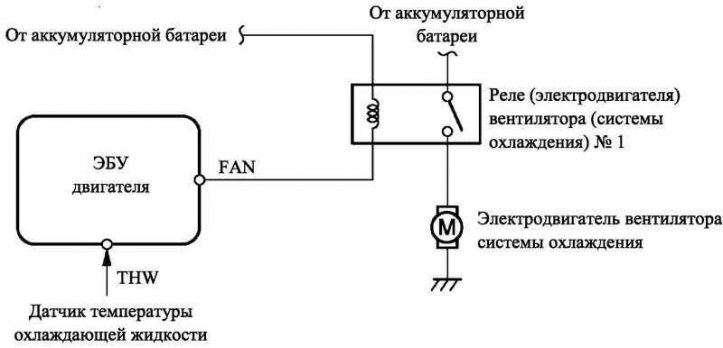
Riža. 2.53. Dijagram spajanja za modele bez klima uređaja
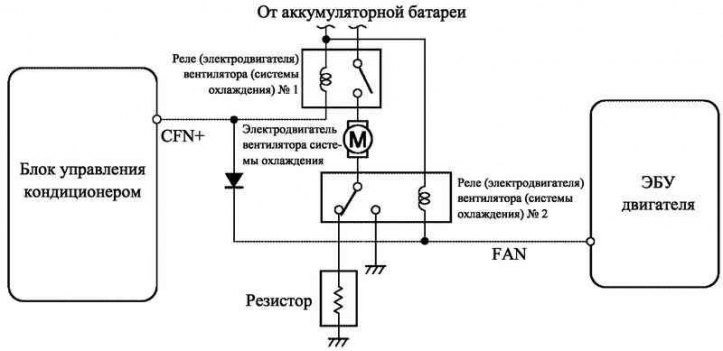
Riža. 2.54. Dijagram spajanja na modelima s klima uređajem
Na modelima bez klima uređaja, ECU motora kontrolira brzinu ventilatora na temelju senzora temperature rashladne tekućine motora.
Klimatizirani modeli imaju dvije brzine ventilatora: nisku i visoku. ECU motora naređuje da se aktivira velika brzina ovisno o signalima osjetnika temperature rashladne tekućine i osjetnika tlaka klima uređaja. Kontrolu niske brzine provodi upravljačka jedinica klima uređaja.
Funkcija upravljanja starterom «Poluautomatski start»
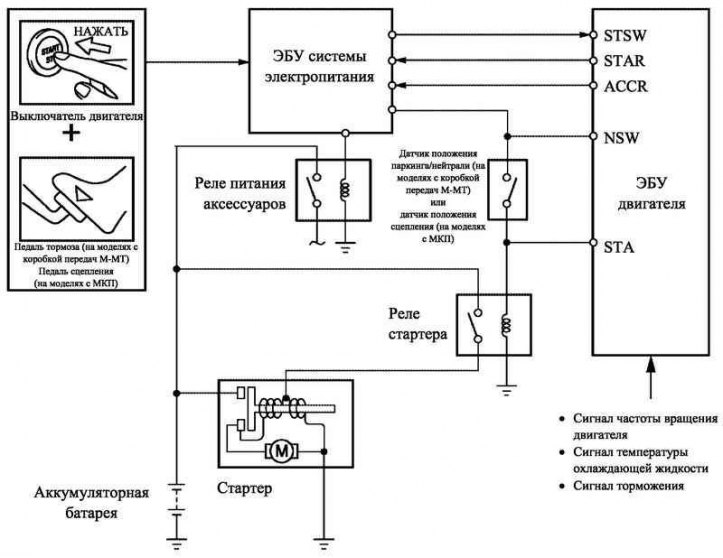
Riža. 2.55. Blok dijagram sustava upravljanja starterom
Novi model automobila koristi funkciju upravljanja starterom «Poluautomatski start». Kada se pritisne tipka za pokretanje motora, ova funkcija je aktivna dok se motor ne pokrene. Papučica kočnice mora biti pritisnuta (na modelima s M-MT multimodalnim ručnim mjenjačem) ili papučicu spojke (na modelima s ručnim mjenjačem). Time se povećava pouzdanost pokretanja motora i isključuje mogućnost rada startera nakon pokretanja motora.
Ako ECU motora primi signal za pokretanje od pogonskog ECU-a, sustav nadzire signal brzine motora (NE) i ne gasi starter dok se motor ne pokrene. Također, ako ECU motora primi signal za pokretanje od ECU snage, ali utvrdi da motor već radi, neće uključiti starter.
Princip rada
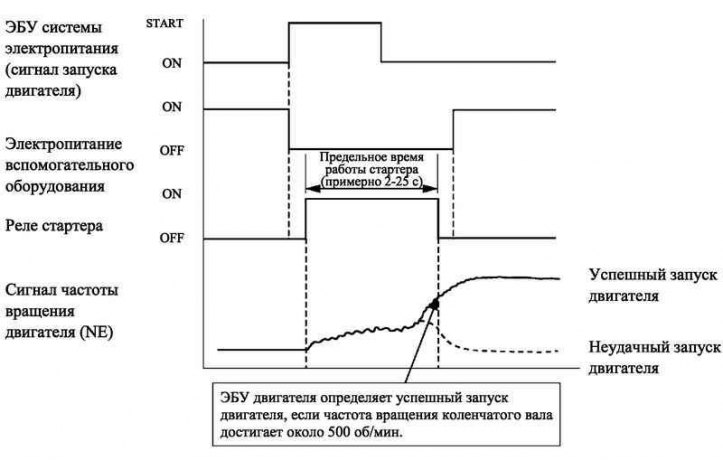
Riža. 2.56. Dijagram rada sustava upravljanja starterom
Kao što je prikazano na slici 2.56, kada ECU motora primi signal za pokretanje (STSW) iz ECU snage, ECU motora šalje signale STAR i ACCR u ECU snage. Potonji, zauzvrat, šalje signal releju startera da uključi starter. Ako motor već radi, ECU motora ne šalje signale STAR i ACCR u ECU napajanja. Stoga, ECU za kontrolu snage ne napaja relej startera.
Nakon što je starter uključen i nakon što brzina motora prijeđe oko 500 min-1, ECU motora utvrđuje da motor radi i isključuje starter.
Ako motor ima kvar i ne pokrene se, starter će raditi maksimalno dopušteno vrijeme, nakon čega će se automatski isključiti. Maksimalno vrijeme rada startera je otprilike 2 do 25 sekundi, ovisno o temperaturi rashladnog sredstva. Ako je temperatura rashladne tekućine vrlo niska, starter radi oko 25 sekundi, a kada je motor dovoljno zagrijan, starter ne radi više od 2 sekunde.
Kako bi se eliminiralo dodatno opterećenje tijekom nestabilnog napona tijekom pokretanja motora, sustav za to vrijeme prekida napajanje pomoćne opreme.
Sustav pruža sljedeće razine zaštite:
- ako motor već radi, starter se neće uključiti čak i ako je ključ za paljenje okrenut u položaj START;
- čak i ako vozač drži ključ za paljenje u položaju START, nakon pokretanja motora od pola okretaja, ECU motora će isključiti starter kada brzina motora dosegne približno 1200 o/min-1 ili više;
- čak i ako vozač drži ključ za paljenje u položaju START i motor se ne pokrene, ECU motora će isključiti starter nakon otprilike 30 sekundi;
- Ako ECU motora ne primi signal brzine motora dok starter radi, odmah će prestati slati signale STAR i ACCR.
Dijagnostika
Dijagnostički sustav tipa EURO-OBD (Europski sustav dijagnostike na vozilu), koji se koristi na motorima 1ZZ-FE i 3ZZ-FE, zadovoljava zahtjeve europskih propisa.
Ako ECU motora otkrije problem, dijagnosticira i bilježi čvor problema. Osim toga, za informiranje vozača na ploči s instrumentima, lampica upozorenja motora Chk Eng stalno se pali ili počinje treptati.
ECU motora također pohranjuje elektroničke DTC-ove za sve greške. Ovi se kodovi mogu očitati pomoću mikroprocesorskog testera P.
Svi DTC-ovi u skladu su sa SAE kodovima. Neki DTC-ovi su podijeljeni u manje pododjeljke nego prije, s novim DTC-ovima koji su dodijeljeni pod-odjeljcima.
Preporuka za održavanje
Za brisanje elektroničkih DTC-ova pohranjenih u memoriji ECU motora, upotrijebite pametni tester II, ili odspojite priključak akumulatora, ili uklonite EFI osigurač na najmanje jednu minutu.
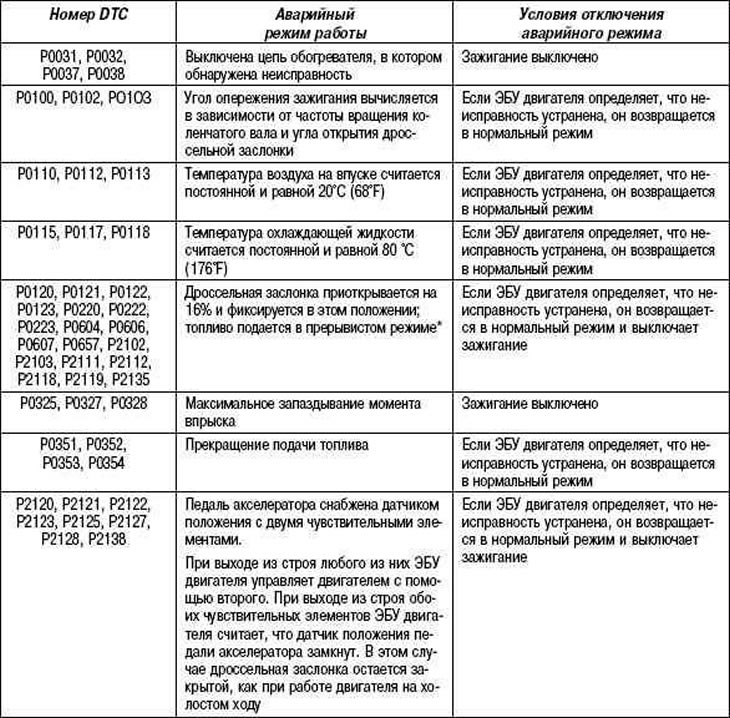
Rad sustava u hitnom načinu rada
Kada se otkrije kvar, ECU motora se isključuje ili stavlja motor u hitni rad prema podacima snimljenim u memoriji.
Tablica 2.9. Rad sustava u hitnom načinu rada