
Všeobecné informácie
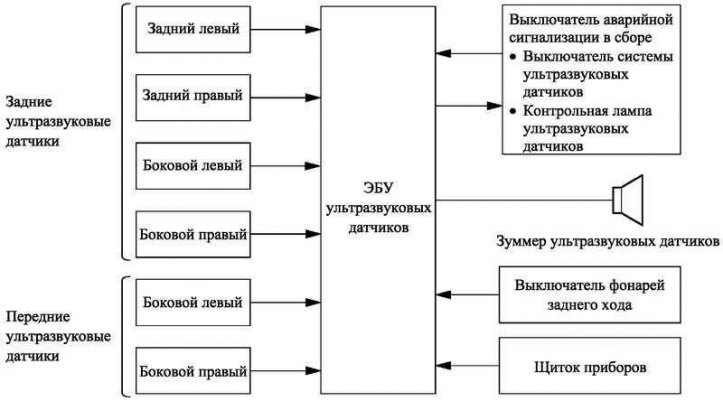
Ryža. 1.30. Bloková schéma sonarového systému
Ryža. 1.31. Umiestnenie hlavných komponentov
Predné a zadné sonarové senzory sú na novej Corolle Verso voliteľné.
Systém obsahuje ultrazvukové senzory, kontrolky a zvukový signál. Systém rozpozná prekážku v rohoch pred a za vozidlom a poskytne vodičovi informácie o vzdialenosti od prekážky a polohe prekážky.
Ak systém deteguje prekážku v blízkosti, výstražné svetlo vo spínači výstražných upozornení zabliká a zaznie zvukový signál, ktorý upozorní vodiča.
Účel hlavných komponentov
Účel hlavných komponentov je uvedený v tabuľke 1.13.
Tabuľka 1.13. Účel hlavných komponentov
Konštrukcia a princíp činnosti ultrazvukového snímača
Ryža. 1.32. Umiestnenie hlavných komponentov
Ultrazvukové snímače sú umiestnené nasledovne: 2 v rohoch predného nárazníka, 2 v rohoch zadného nárazníka a 2 v strede zadného nárazníka (ryža. 1.32). Každý ultrazvukový senzor pozostáva z citlivého prvku, ktorý prenáša a prijíma ultrazvukové vibrácie, a predzosilňovača, ktorý zosilňuje signály. Ultrazvukové snímače poskytujú vstupné a výstupné signály do ECU ultrazvukového snímača.
Podmienky vypnutia systému
Rýchlosť vozidla, pri ktorej sa senzor zapne (pre všetky senzory): menej ako 8 km/h - 15 km/h.
Poloha radiacej páky, pri ktorej sa aktivuje snímač (pre všetky senzory):
Nesprávne údaje v dôsledku otvoreného okruhu snímača, námrazy alebo kontaminácie.
Ultrazvukový bzučiak
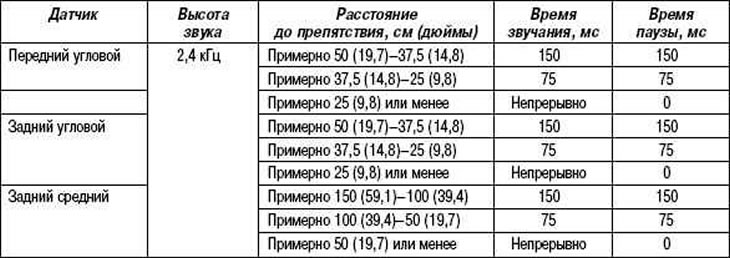
Frekvencia prerušovaného zvukového signálu systému závisí od vzdialenosti od prekážky (pozri tabuľku 1.14).
Bzučiak je namontovaný na ECU ultrazvukového snímača na konzole.
Tabuľka 1.14. Činnosť bzučiaka v závislosti od vzdialenosti od prekážky
Závislosť melódie bzučiaka od miesta prekážky
Senzory sú združené do dvoch skupín: predné, do ktorých patria predné rohové senzory, a zadné, do ktorých patria zadné rohové a zadné stredné senzory.
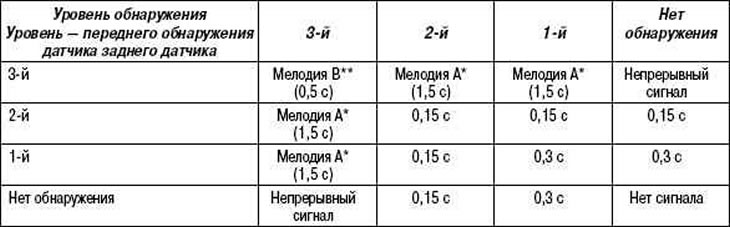
Nižšie uvedená tabuľka ukazuje, ako sa tón bzučiaka mení v závislosti od veľkosti prekážky.
Tiež ukazuje, ako sa mení tón bzučiaka v závislosti od toho, či je prekážka detekovaná prednými alebo zadnými senzormi.
Tabuľka 1.15. Frekvencia zvuku bzučiaka
Kontrolka a spínač systému ultrazvukových snímačov
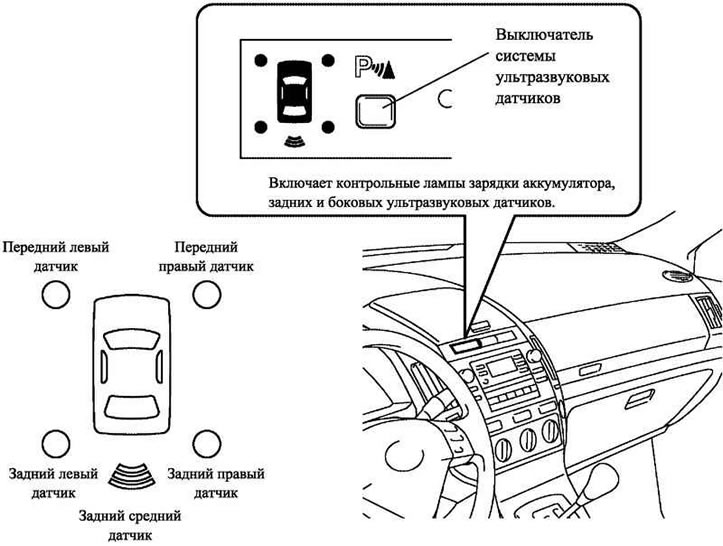
Ryža. 1.33. Kontrolka a spínač systému ultrazvukových snímačov
Spínač a výstražná kontrolka pre ultrazvukové snímače sú inštalované v bloku spínačov alarmu (ryža. 1.33).
Ultrazvukové snímače ECU
Ultrazvuková senzorová ECU riadi celý systém, vrátane ovládania vysielania a príjmu ultrazvukových signálov, spracovania prijatých signálov, detekcie prítomnosti prekážky, zapínania svetelných a zvukových alarmov a detekcie prerušenia obvodov senzorov.

Ryža. 1.34. Ultrazvukové snímače ECU
Ultrazvukový snímač ECU má schopnosť upraviť hlasitosť zvuku bzučiaka (ryža. 1.34).
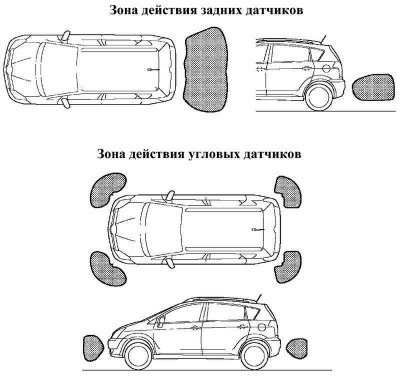
Ryža. 1.35. Oblasť pokrytia snímača
Zapnutie systému
Systém sa zapne, ak motor beží, spínač systému ultrazvukového snímača je zapnutý a sú splnené podmienky uvedené v tabuľke 1.16.
Tabuľka 1.16. Podmienky zapnutia snímačov

Počiatočná kontrola («Samodiagnostika»)
Po zapnutí systém parkovacieho asistenta Toyota na 1 rozsvieti výstražnú kontrolku a bzučiak a skontroluje činnosť ultrazvukových snímačov.
Ak systém nedokáže rozpoznať prekážky v dôsledku chybného ultrazvukového snímača, informuje vodiča prerušovaným rozsvietením kontrolky zodpovedajúcej chybnému snímaču a tiež zvukovým signálom.
Systémové opatrenia
Vzdialenosť od prekážok nemusí byť určená správne za nasledujúcich podmienok:
- ak sú snímače pokryté ľadom, snehom alebo blatom. po vyčistení sa ich výkon obnoví;
- ak je snímač zamrznutý. po rozmrazení sa výkon snímača obnoví;
- ak je snímač zakrytý cudzím predmetom. po odstránení rušenia sa výkon snímača obnoví.
Poznámka. Niekedy sa na displeji môže zobraziť hlásenie o poruche systému v dôsledku zamrznutia snímačov, najmä v chladnom počasí.
Poznámka. Ak sa zobrazí chybové hlásenie, je potrebné skontrolovať snímače. Ak chybové hlásenie zostane na displeji, aj keď na snímači nie je žiadna nečistota, ľad alebo sneh, snímač môže byť chybný.
Dosah snímača sa môže znížiť za nasledujúcich podmienok:
- ak je snímač pokrytý napríklad snehom alebo blatom;
- ak je vozidlo prevádzkované na prudkom slnku alebo pri veľmi nízkych teplotách.
Systém môže chybne určiť vzdialenosť k prekážkam za nasledujúcich podmienok:
- ak vozidlo jazdí po hrboľatej ceste, štrkovej ceste alebo tráve;
- ak je snímač ovplyvnený zvukovými signálmi z iných vozidiel, zvukom motora motocykla, zvukom vzduchových bŕzd ťažkého nákladného vozidla alebo inými ultrazvukovými vibráciami;
- ak prší alebo je auto poliate vodou;
- ak je auto silne naklonené;
- ak má vozidlo rádiovú anténu;
- ak sú snímače pokryté ľadom, snehom alebo blatom;
- ak sa vozidlo pohybuje smerom k vysokému obrubníku;
- ak je v blízkosti ďalšie auto s ultrazvukovými snímačmi;
- ak je vozidlo vybavené ťažným zariadením.
Niektoré z nižšie uvedených objektov nemusia byť detekované ultrazvukovými senzormi:
- tenké predmety, ako je lano alebo lano;
- predmety s malou odraznou plochou, ako je drôtený plot;
- predmety, ktoré absorbujú ultrazvukové vibrácie, ako sú balíky vaty alebo snehové záveje;
- predmety s vyčnievajúcimi ostrými hranami;
- príliš nízke predmety;
- predmety s vysokým výstupkom zhora.
Niektoré ďalšie dôvody:
- predmety nachádzajúce sa priamo pod nárazníkmi nie sú detekované. aj keď sú v určitom bode detekované predmety nachádzajúce sa pod senzormi alebo tenkými tyčami, keď sa vozidlo k týmto objektom približuje ďalej, senzory ich nemusia rozpoznať;
- objekt nemusí byť detekovaný, ak je umiestnený príliš blízko snímačov;
- Snímače nemusia fungovať správne, ak boli vystavené silnému nárazu, napríklad zasiahnutiu alebo zasiahnutiu predmetmi.