
General information
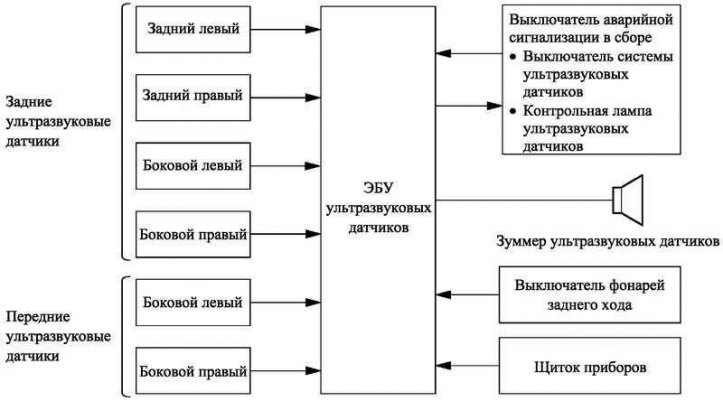
Pic. 1.30. Block diagram of a sonar system
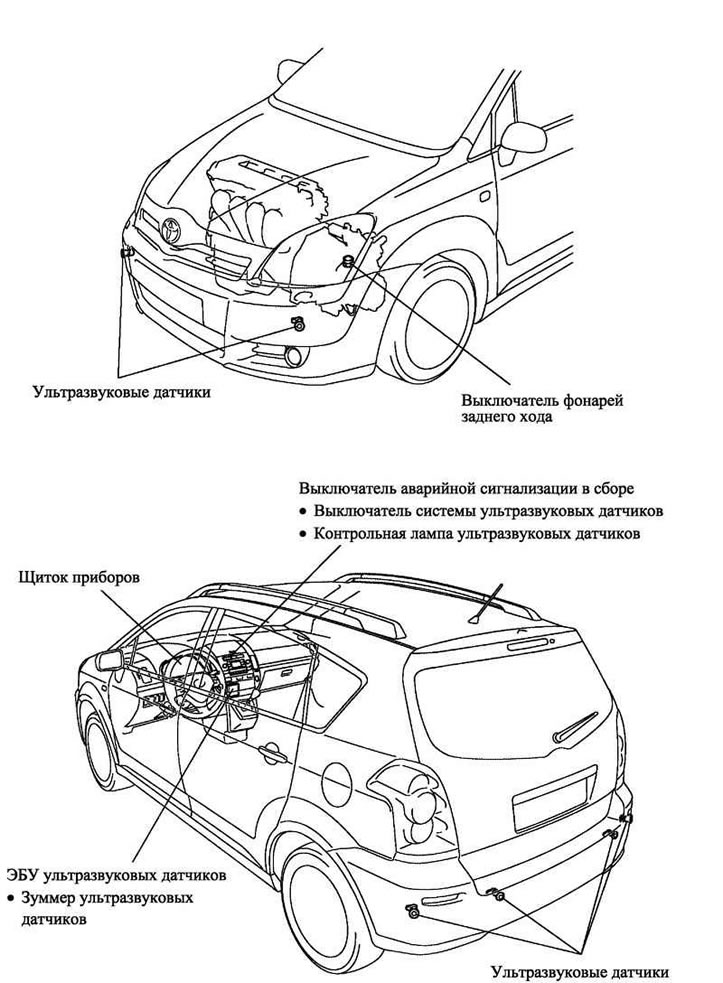
Pic. 1.31. Location of main components
Front and rear sonar sensors are optional on the new Corolla Verso.
The system includes ultrasonic sensors, control lamps and a sound signal. The system detects an obstacle at the corners in front and behind the vehicle and provides the driver with information about the distance to the obstacle and the position of the obstacle.
If the system detects a nearby obstacle, the warning light in the hazard warning switch flashes and an audible signal sounds to alert the driver.
Purpose of the main components
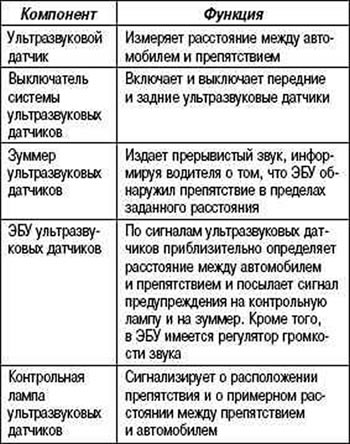
The purpose of the main components is given in Table 1.13.
Table 1.13. Purpose of the main components
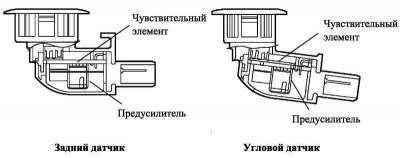
The design and principle of operation of the ultrasonic sensor
Pic. 1.32. Location of main components
Ultrasonic sensors are located as follows: 2 at the corners of the front bumper, 2 at the corners of the rear bumper and 2 in the middle of the rear bumper (pic. 1.32). Each ultrasonic sensor consists of a sensitive element that transmits and receives ultrasonic vibrations, and a preamplifier that amplifies the signals. The ultrasonic sensors provide input and output signals to the ultrasonic sensor ECU.
System shutdown conditions
Vehicle speed at which the sensor turns on (for all sensors): less than 8 km/h - 15 km/h.
The position of the gear lever at which the sensor is activated (for all sensors):
Incorrect readings due to an open sensor circuit, icing or contamination.
Ultrasonic buzzer
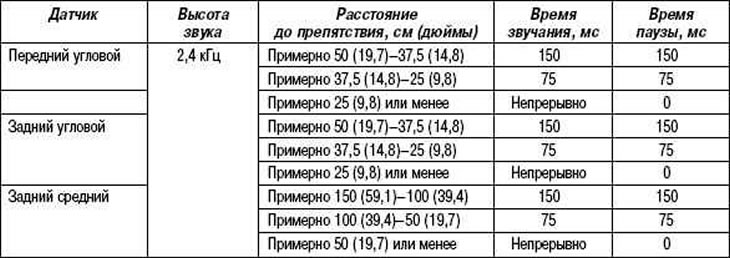
The frequency of the intermittent sound signal of the system depends on the distance to the obstacle (see table 1.14).
The buzzer is mounted on the ultrasonic sensor ECU on a bracket.
Table 1.14. The operation of the buzzer depending on the distance to the obstacle
Dependence of the melody of the buzzer signal on the location of the obstacle
The sensors are combined into two groups: the front, which includes the front corner sensors, and the rear, which includes the rear corner and rear middle sensors.
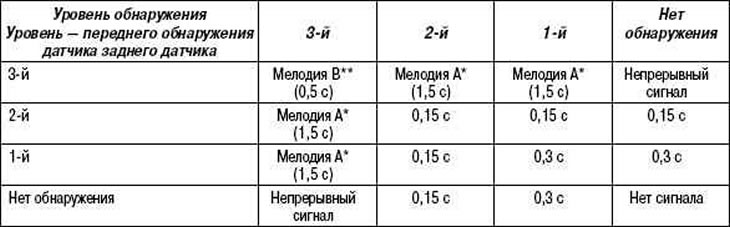
The table below shows how the buzzer tone changes depending on the size of the obstacle.
It also indicates how the buzzer tone changes depending on whether an obstacle is detected by the front or rear sensors.
Table 1.15. Buzzer sound frequency
Pilot lamp and switch of the ultrasonic sensor system
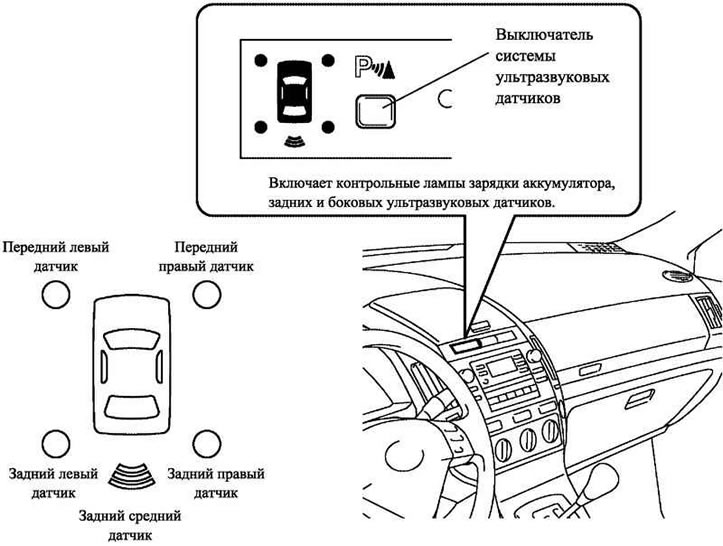
Pic. 1.33. Pilot lamp and switch of the ultrasonic sensor system
The switch and warning lamp for ultrasonic sensors are installed in the alarm switch block (pic. 1.33).
ECU ultrasonic sensors
The ultrasonic sensor ECU controls the entire system, including controlling the transmission and reception of ultrasonic signals, processing the received signals, detecting the presence of an obstacle, turning on the light and sound alarms, and detecting breaks in the sensor circuits.

Pic. 1.34. ECU ultrasonic sensors
The ultrasonic sensor ECU has the ability to adjust the volume of the buzzer sound (pic. 1.34).
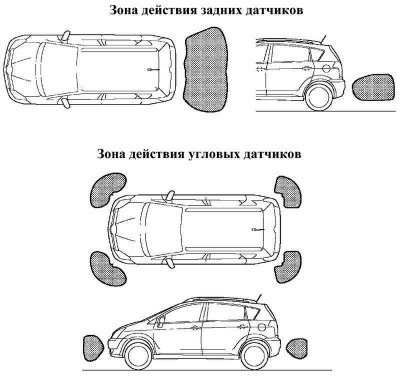
Pic. 1.35. Sensor coverage area
Turning on the system
The system turns on if the engine is running, the ultrasonic transducer system switch is on, and the conditions listed in Table 1.16 are met.
Table 1.16. Conditions for switching on sensors

Initial check («Self-diagnosis»)
After turning on, the Toyota Parking Assist System at 1 turns on the warning lamp and buzzer and checks the operation of the ultrasonic sensors.
If the system is unable to detect obstacles due to a faulty ultrasonic sensor, it informs the driver by intermittently switching on the warning light corresponding to the faulty sensor, as well as an audible signal.
System Precautions
The distance to obstacles may not be determined correctly under the following conditions:
- if the sensors are covered with ice, snow or mud. after cleaning, their performance will be restored;
- if the sensor is frozen. after defrosting, the sensor's performance will be restored;
- if the sensor is covered by a foreign object. after the interference is removed, the sensor's performance will be restored.
Note. Sometimes the display may show a system malfunction message due to frozen sensors, especially in cold weather.
Note. If a fault message is displayed, the sensors should be checked. If the fault message remains on the display even when there is no dirt, ice or snow on the sensor, the sensor may be defective.
The range of the sensor may be reduced under the following conditions:
- if the sensor is covered, for example, with snow or mud;
- if the car is operated in the scorching sun or at very low temperatures.
The system may erroneously determine the distance to obstacles under the following conditions:
- if the vehicle is driven on a bumpy road, on a gravel road or on grass;
- if the sensor is affected by sound signals from other vehicles, the sound of a motorcycle engine, the sound of air brakes of a heavy truck, or other ultrasonic vibrations;
- if it is raining or the car is poured with water;
- if the car is strongly inclined;
- if the car has a radio antenna;
- if the sensors are covered with ice, snow or mud;
- if the vehicle is moving towards a high curb;
- if there is another car with ultrasonic sensors nearby;
- if the vehicle is equipped with a tow hitch.
Some of the objects listed below may not be detected by ultrasonic sensors:
- thin objects, such as rope or rope;
- objects with a small reflective surface area, such as a wire fence;
- objects that absorb ultrasonic vibrations, such as bales of cotton wool or snowdrifts;
- objects with protruding sharp edges;
- too low objects;
- objects with a high protrusion from above.
Some other reasons:
- objects located directly under the bumpers are not detected. even if objects located below the sensors or thin rods are detected at some point, as the vehicle approaches these objects further, they may not be detected by the sensors;
- an object may not be detected if it is located too close to the sensors;
- The sensors may not work properly if they have been subjected to strong shock, such as being hit or hit by objects.