The safety feature now works even when the sunroof is raised and lowered. In addition, the sunroof ECU now receives the speed signal while the vehicle is moving. This measure is introduced in order to prevent the safety function from being triggered due to air resistance applied to the sunroof.
In the new model, the sunroof is installed on vehicles in the configuration indicated in Table 1.20.
Table 1.20. Sunroof kit

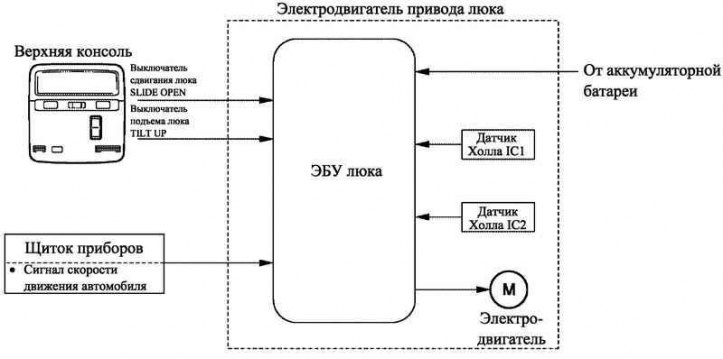
Pic. 1.45. Sunroof System Block Diagram
Maintenance recommendation
The ECU remembers the initial position of the sunroof. In some cases, for example, when the battery terminal is disconnected while the sunroof drive is operating, this position may be erased from memory or an incorrect position may be stored. In this case, the sunroof will not work properly. Sunroof position should be initialized as described below.
Press and hold the TILT UP switch until the sunroof stops. Then release the switch.
After 10 seconds, press and hold the TILT UP switch until the sunroof rises all the way and then automatically lowers slightly.
Release the TILT UP switch and then press and hold it again within 5 seconds until three operations have been completed (lowering, shifting open, shifting closed).
After these operations, sunroof position initialization is completed.
Safety mechanism
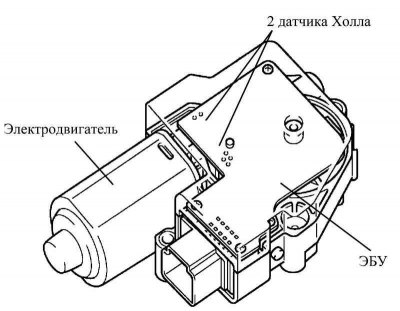
Pic. 1.46. Safety mechanism
The Hall sensor converts the changes in magnetic flux that occur as the worm wheel rotates into pulse signals and sends them to the sunroof ECU (pic. 1.46).
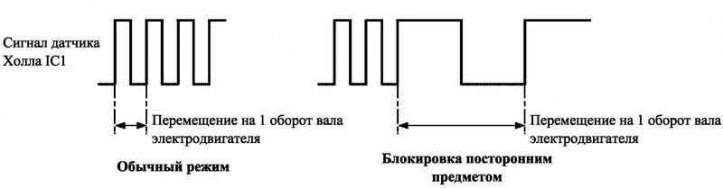
Pic. 1.47. Scheme for determining the amount of movement and the moment of blocking the hatch with a foreign object
Maintenance recommendation
The test procedure has been changed in accordance with changes in the sunroof electric circuit.
To control the safety function, the ECU determines the amount of movement and the moment the hatch is blocked by a foreign object based on pulse signals from the Hall sensor IC1; the direction of movement of the hatch is determined by the phase difference of the pulses coming from the Hall sensor IC1 and from the Hall sensor IC2.
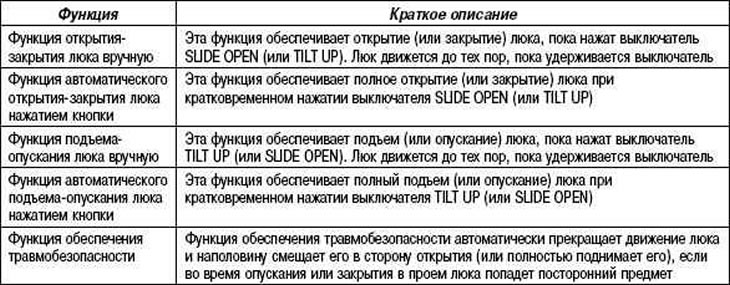
Table 1.21. Sunroof functions